【环境搭建】ubuntu22安装ros2
基于某种特殊需求,从Ubuntu16到22目前都尝试过安装ros、ros2
参考1:http://t.csdnimg.cn/DzvSe
参考2:http://t.csdnimg.cn/sOzr1
1.设置locale
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2.确认软件源
2.1 universe
使用如下命令检查:
apt-cache policy | grep universe
返回可能有若干行,但是应该包含如下内容:
500 http://us.archive.ubuntu.com/ubuntu jammy/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy,n=jammy,l=Ubuntu,c=universe,b=amd64
如果没有包含上述内容,那么输入如下命令:
sudo apt install software-properties-common
sudo add-apt-repository universe
Ubuntu 将其软件分为四个关键软件源:
Main:默认启用,包含 Ubuntu 维护的自由和开源软件。
Restricted:默认启用,提供设备的专有驱动程序。
Universe:提供由社区维护的自由和开源软件,满足各种软件许可和维护需求。
Multiverse:提供因版权或法律条款而受限的软件。
2.2 ros2软件源
先添加证书
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
以上操作的本质是将ros.key这个文件下载并重命名为ros-archive-keyring.gpg到指定路径下。
按照官方给的教程是这个地址,但这个地址国内大概率是访问不了的,https://raw.githubusercontent.com,网上流传的直接将域名和IP加到hosts文件中其实也不实用,这个地址无论是域名还是IP我们都不好访问(国外地址)。
国内其实已经有人做好解决方案了,比如小鱼的一键安装,还有就是清华的解决方案,这里我们采用清华的软件源。
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://mirrors.tuna.tsinghua.edu.cn/rosdistro/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy main" | tee /etc/apt/sources.list.d/ros2.list > /dev/null
这里一定注意,[arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg]不要省略。完成以上操作后执行sudo apt update试下,不报错就是配好了。
3.安装ros2
这里安装的桌面版的,大概2G,也要注意ubuntu不同版本对应不同的ros2版本,不要强行安装非官方指定对应版本,会很麻烦。
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
装完后记得配置环境变量
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
测试下
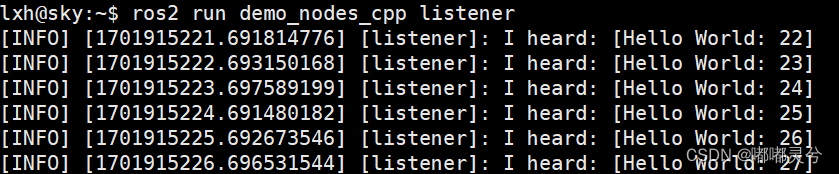
ros2 run demo_nodes_cpp talker

ros2 run demo_nodes_cpp listener