【无人车】无人驾驶地面车辆避障研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现
💥1 概述
随着信息时代的发展,无人车的功能日渐丰富,在物流运输、室内清洁与安防巡检等领域发挥重要作用。特别是在安防巡检领域,无人车可替代人工巡检,并有效的节省人力资源,提高巡检的安全性。
📚2 运行结果


部分代码:
clear all;
close all;
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
% goal point
% threat obstacle
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = (0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)/y(iter_j+1)));
end
end
figure(2)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% agent
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = 0.3*(0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)));
end
end
figure(3)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% swarm
for iter = 1 : 31
for iter_j = 1 : 99
cost_goal(iter,iter_j) = 1-exp(-(y(iter_j))/y(iter_j+1));
end
end
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
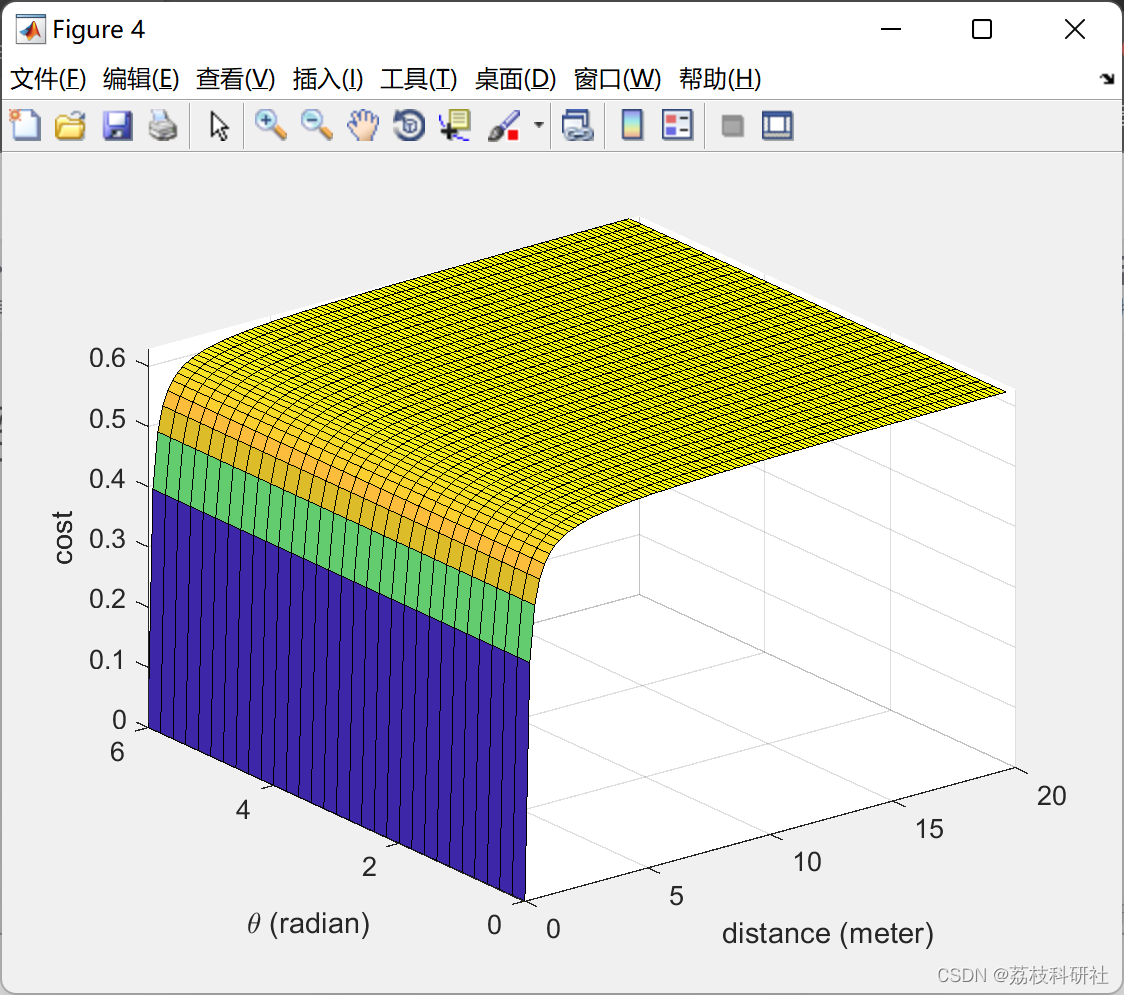
figure(4)
surf(y(1:99),x,cost_goal);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (radian)')
zlabel('cost')
clear all;
close all;
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
% goal point
% threat obstacle
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = (0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)/y(iter_j+1)));
end
end
figure(2)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% agent
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = 0.3*(0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)));
end
end
figure(3)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% swarm
for iter = 1 : 31
for iter_j = 1 : 99
cost_goal(iter,iter_j) = 1-exp(-(y(iter_j))/y(iter_j+1));
end
end
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
figure(4)
surf(y(1:99),x,cost_goal);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (radian)')
zlabel('cost')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]王桢发. 无人车巡检路径规划研究[D].南京邮电大学,2022.DOI:10.27251/d.cnki.gnjdc.2022.000481.