网络路径下倾斜模型生产流程-空三计算,像控刺点
网络路径下倾斜模型生产流程-空三计算,像控刺点
1.新建工程
①新建工程文件夹
确定本机的网络路径,如演示机为192.168.100.10
在网络路径下新建工程文件夹,如//192.168.100.10/e/YNPE27
在工程文件夹下,新建工程存储文件夹CC和照片存储文件夹JPG

将要处理的照片拷贝到JPG文件夹下。
②新建工程
打开ContextCapture Center Engine和ContextCapture Center Master
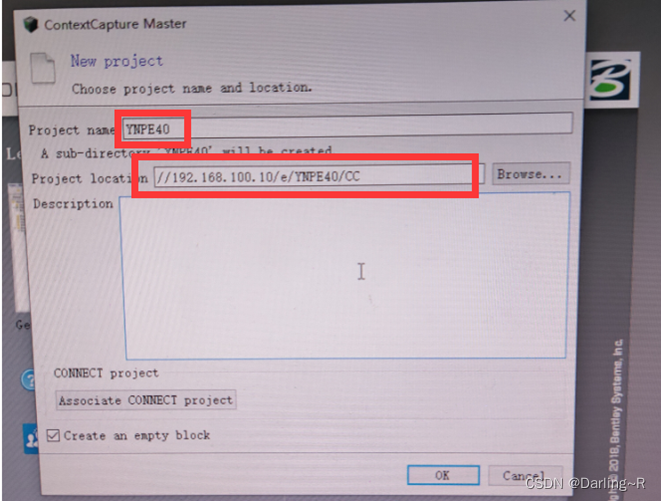
在ContextCapture Center Master中点击New project,输入工程名称,选择工程存储路径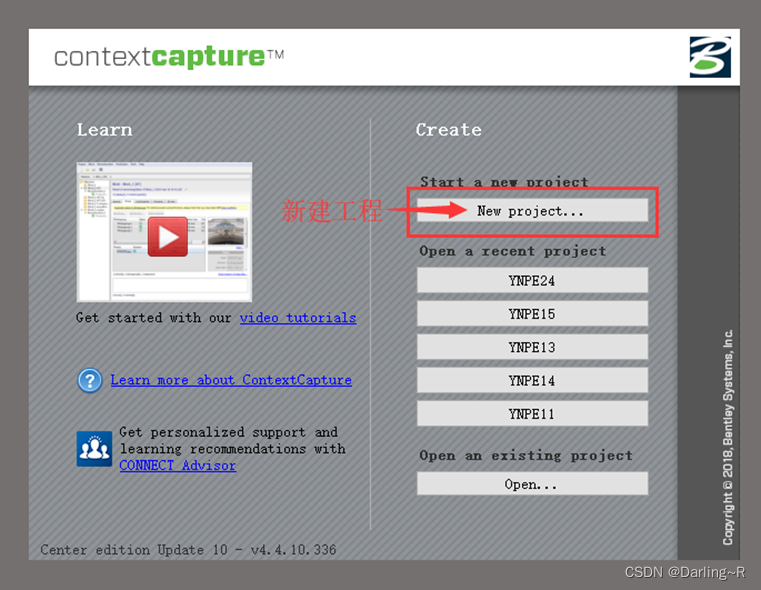
工程存储路径选为 //192.168.100.10/e/YNPE40/CC 输入相应的工程名,然后点击OK。
(此步需选择网络路径下的文件夹,否则会出现只有本机工作,其余工作机器无法进行作业的情况)
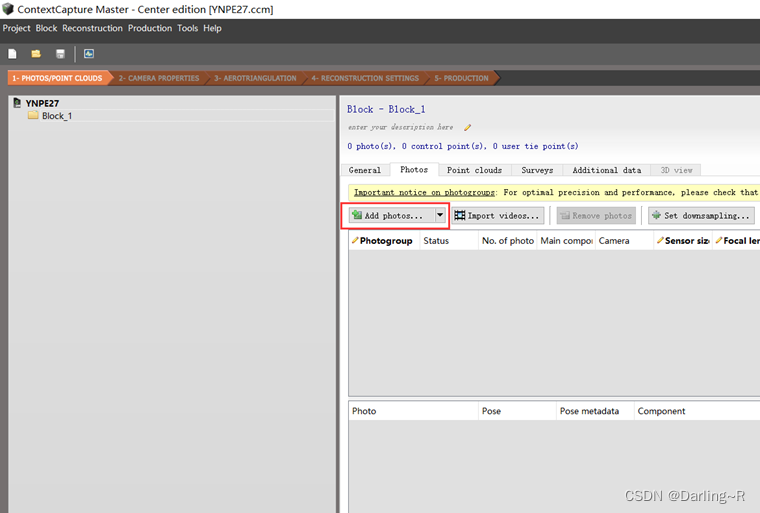
③添加影像
工程已经建好,在Photos下Add photos,向工程中加入影像。
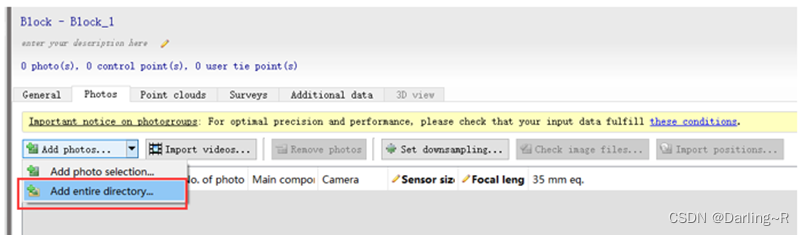
选择JPG文件夹 //192.168.100.10/e/YNPE40/JPG (需选择网络路径下的文件夹)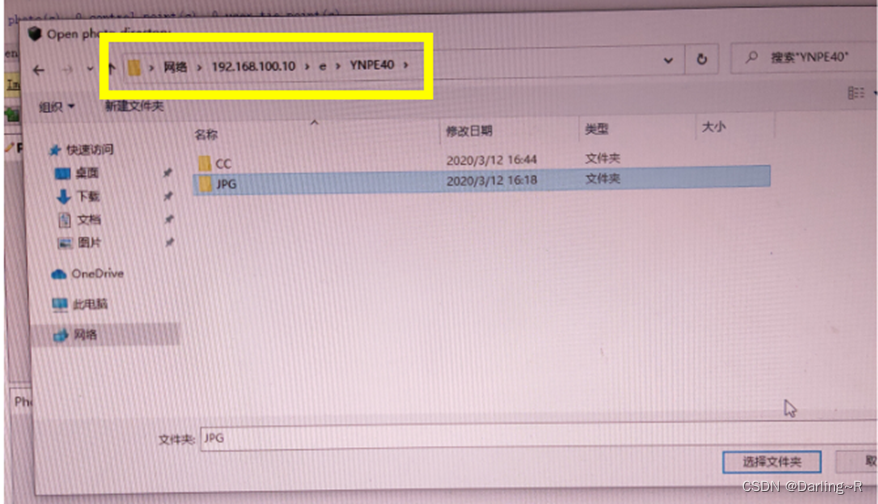
是否包含子文件夹,选择Yes
影像已经全部加入到工程中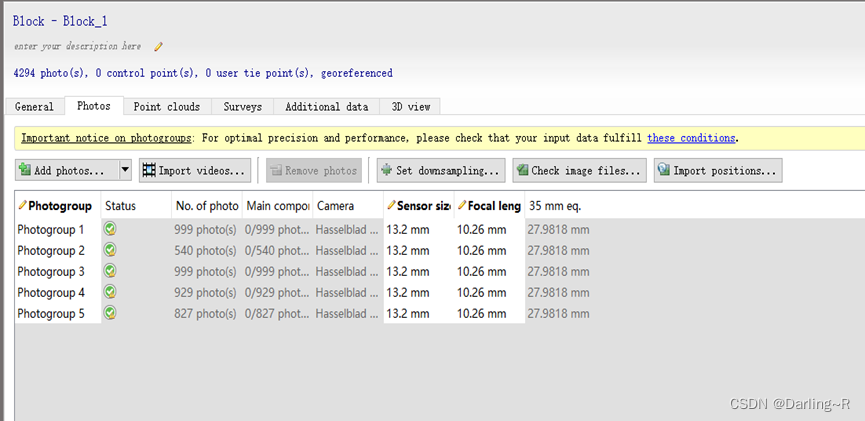
此时点击照片,查看照片路径,确认其为网络路径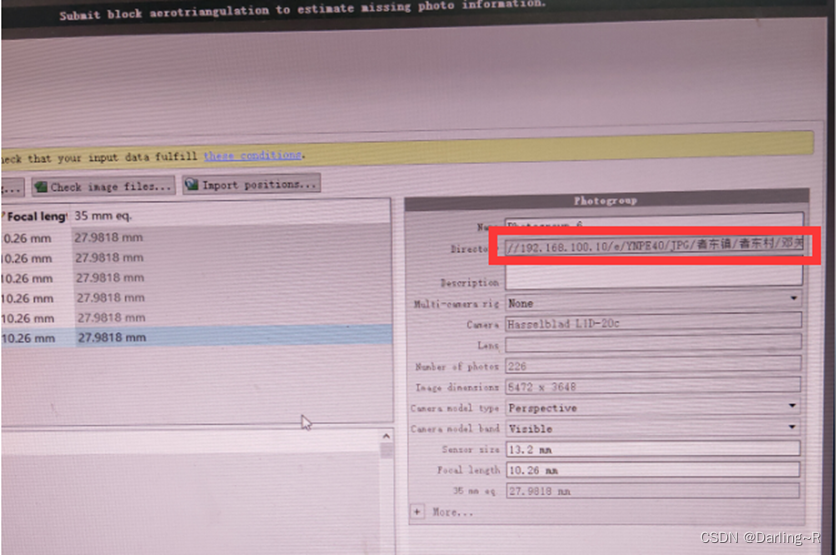
在3D view中查看影像POS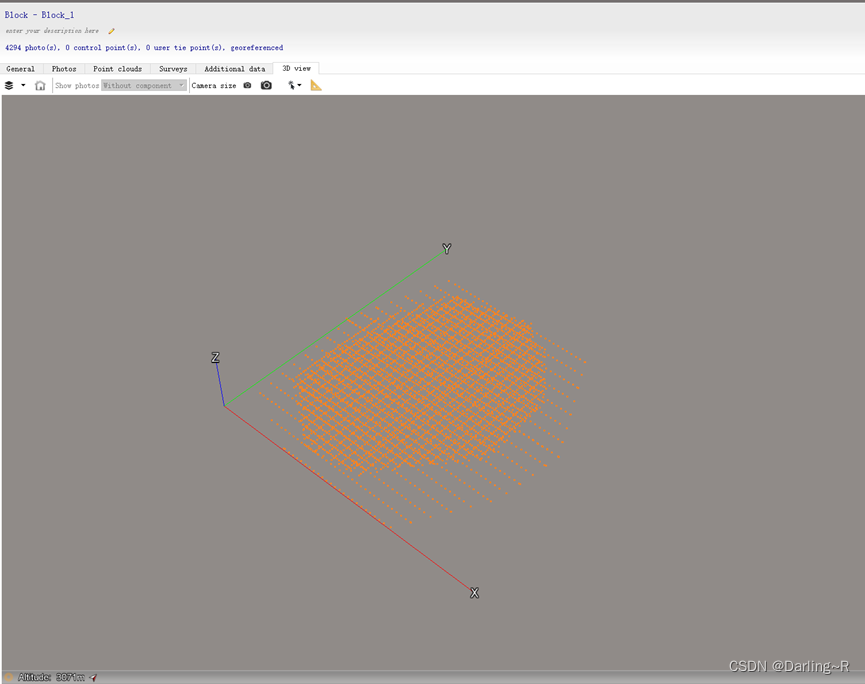
2.空三(自由网)
点击Submit aerotriangulation,进行空三
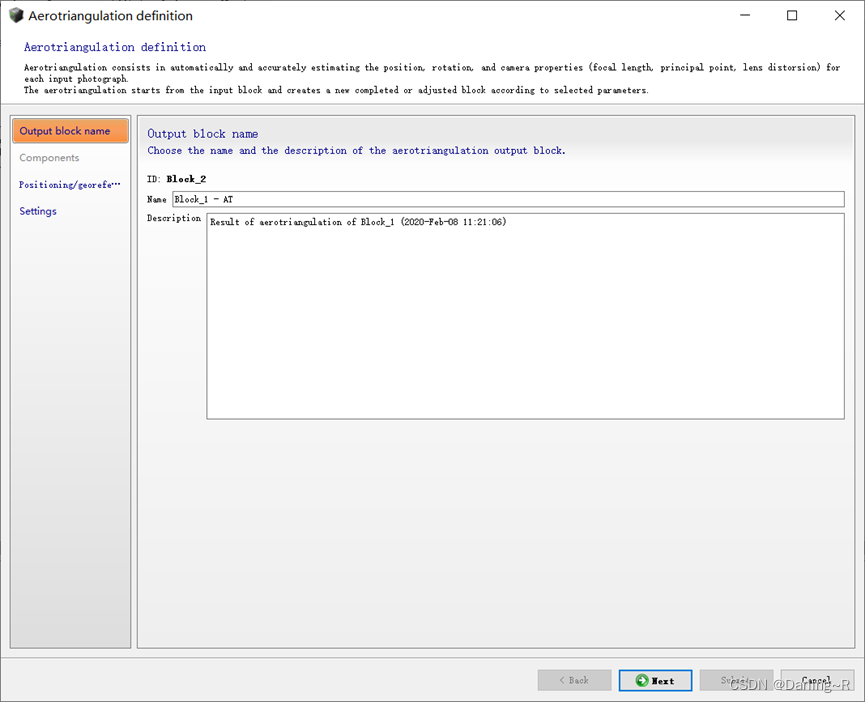
选择使用影像本身POS信息进行空三(自由网)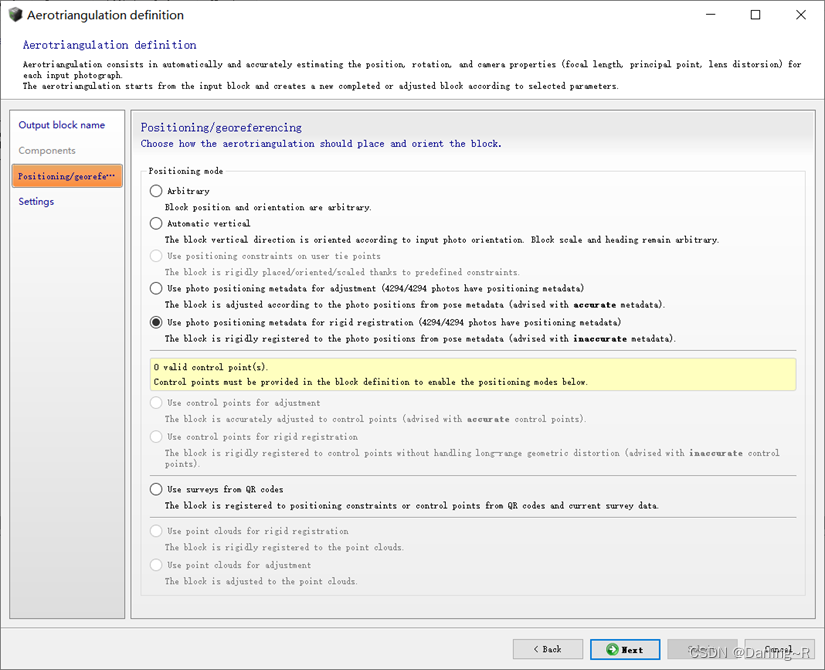
空三自由网时不用进行影像色彩均衡化,在参数设置中关闭后,点击Submit开始空三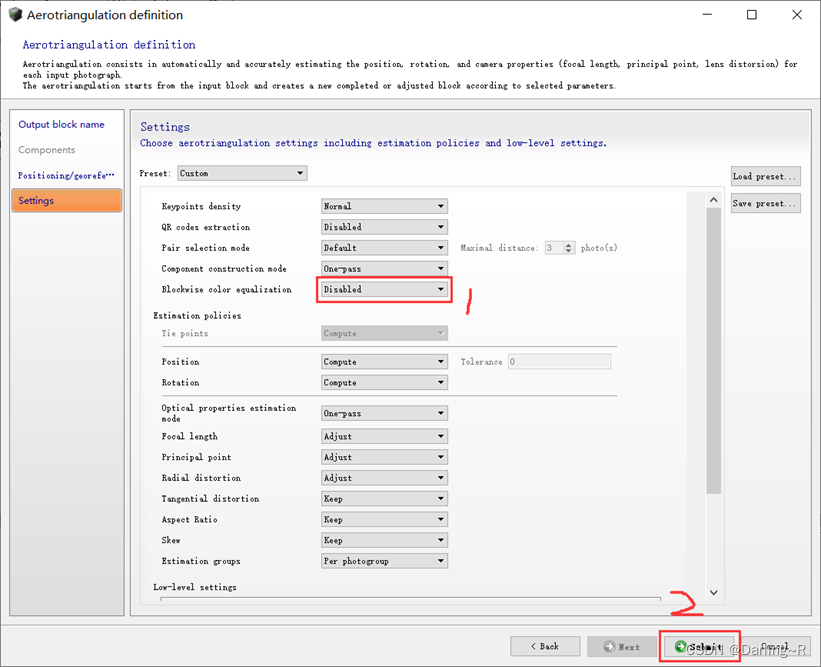
空三自由网已经开始运行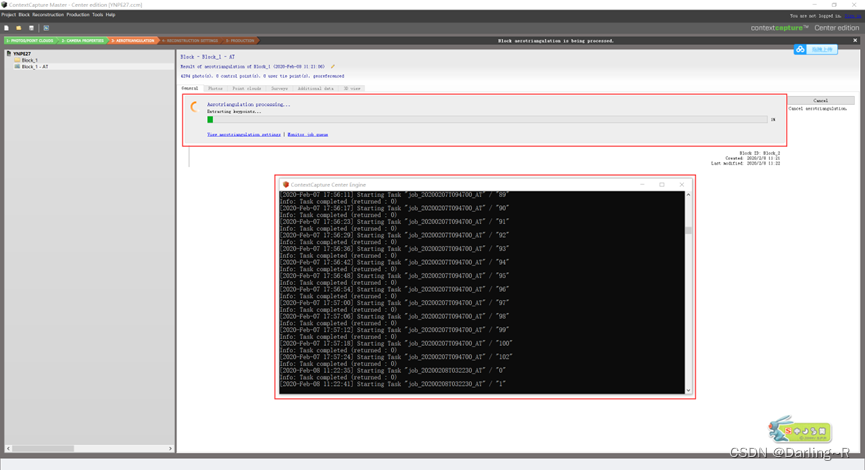
经过几小时或者更长时间(根数据量大小有关),完成了空三自由网。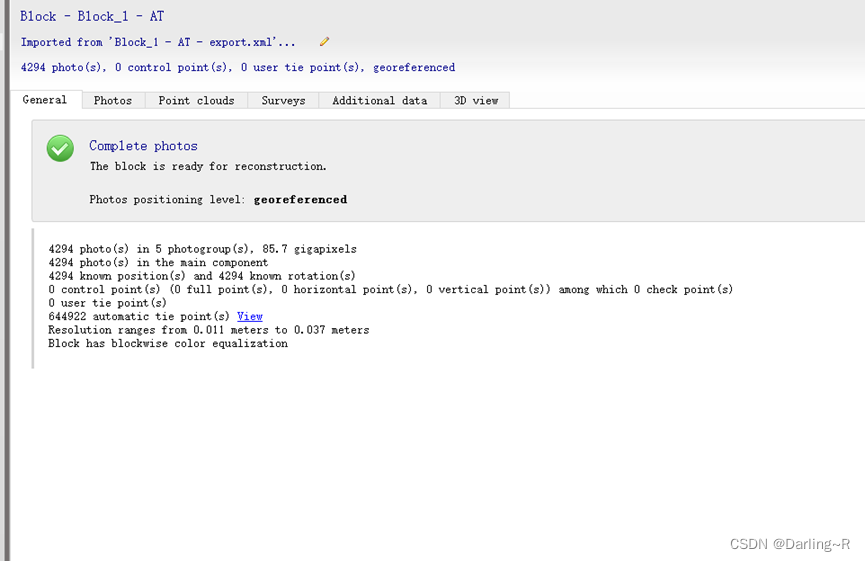
在3D view查看空三自由网的情况,查看是否有分层、网错误等情况。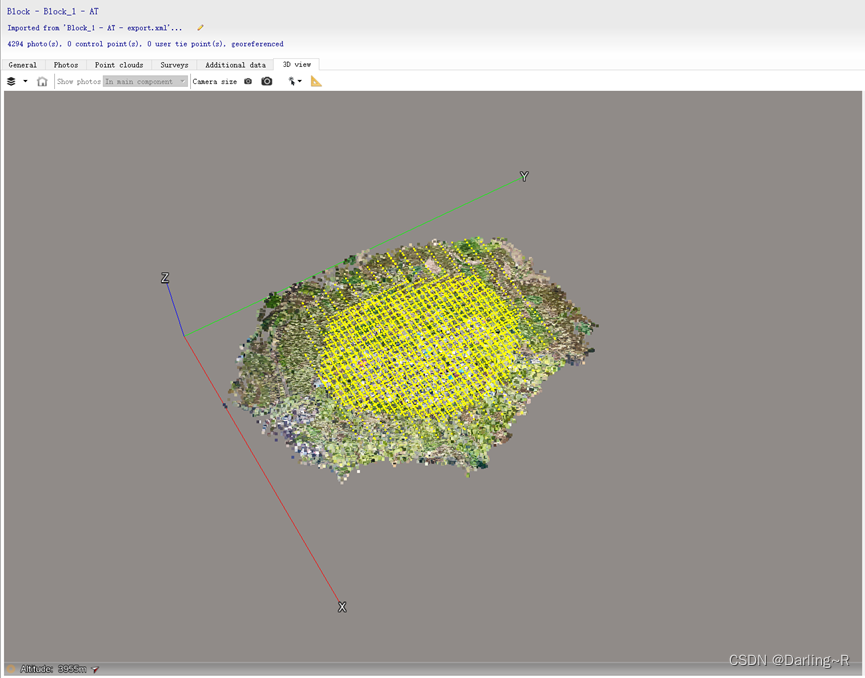
3.空三(控制点)
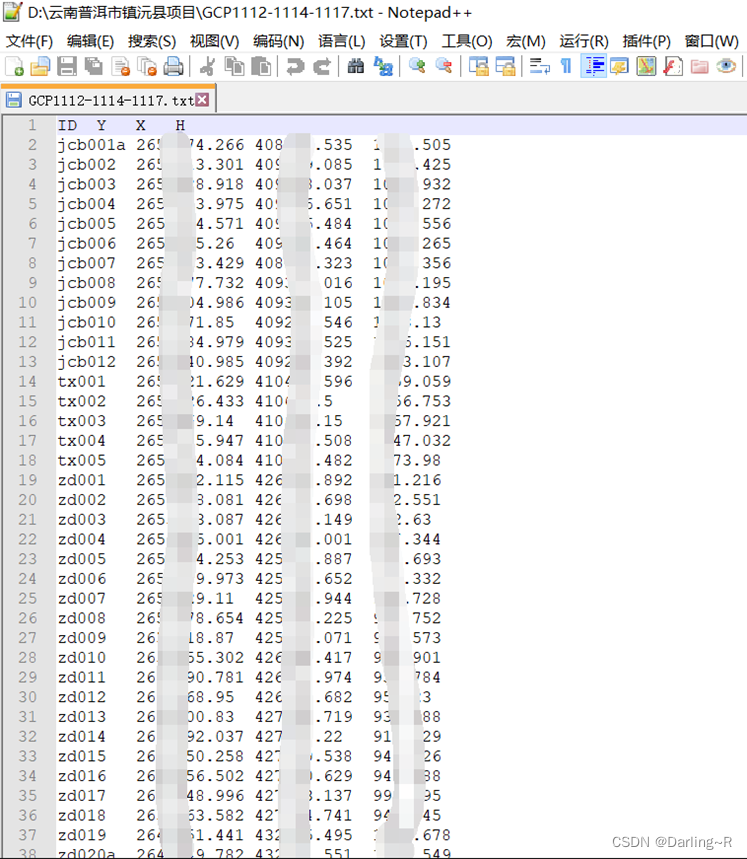
本次RTK测量工作中导出的控制点格式为:ID Y X H,具体如下所示
在完成自由网空三后,将控制点导入到工程中来,在Surveys中选择Custom text format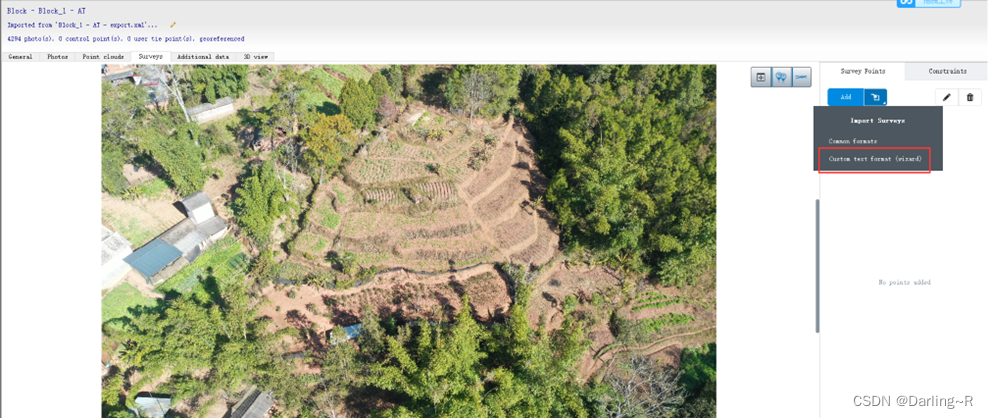
选择控制点txt文件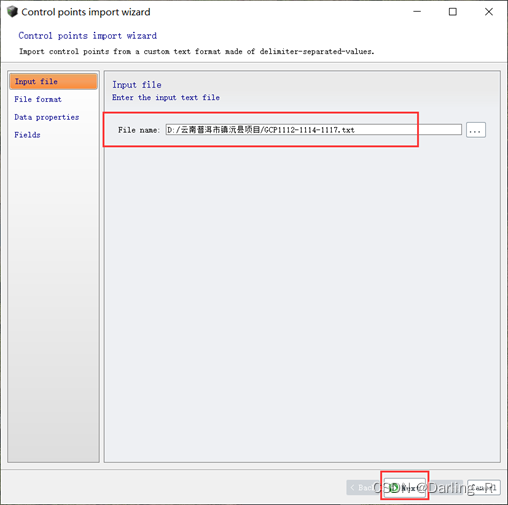
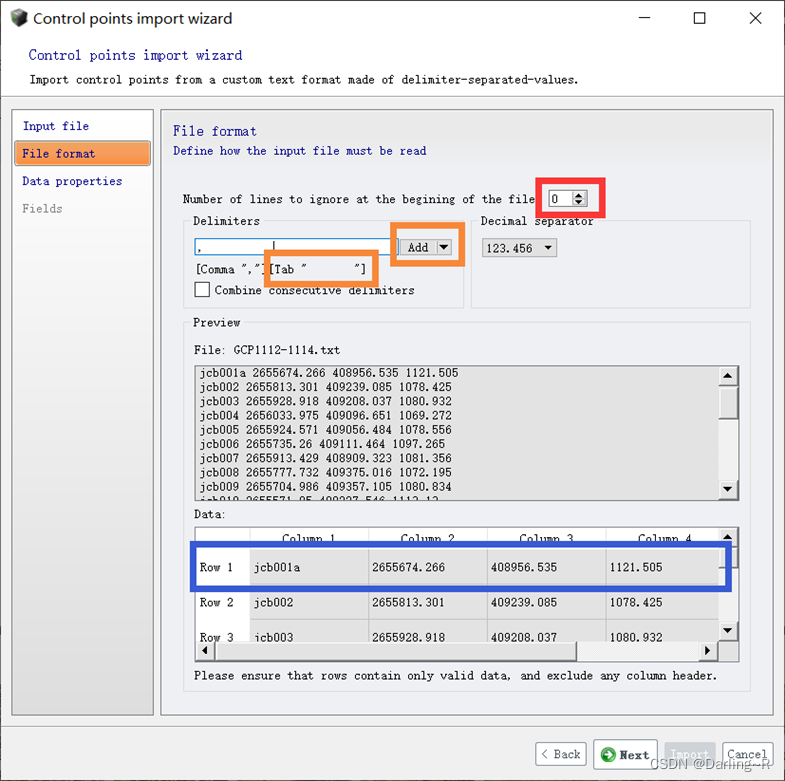
分隔方式选择[Tab ” “]
观察Data 中 Row1 如果Row1为坐标,则红框数字选为0;如果Row1为表头,如ID Y X Z ,则红框数字选为1
选择控制点对应的坐标系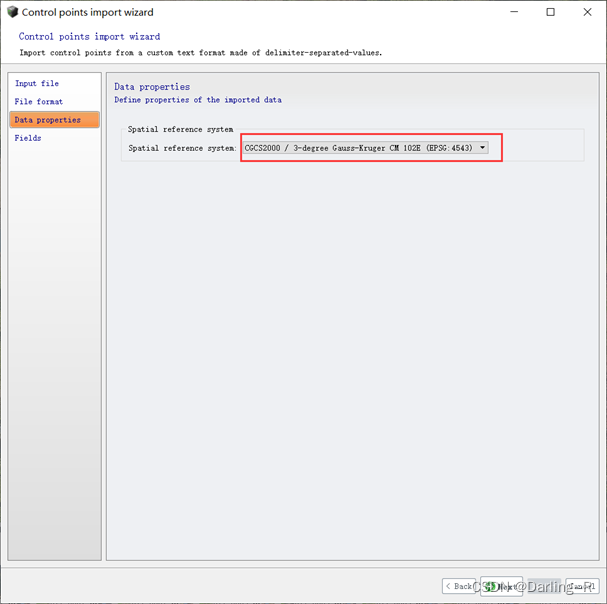
将对应列选择对应的Name Y X Z ,其中X为6位或者8位、Z为高程,位数最少,根据此规则进行选择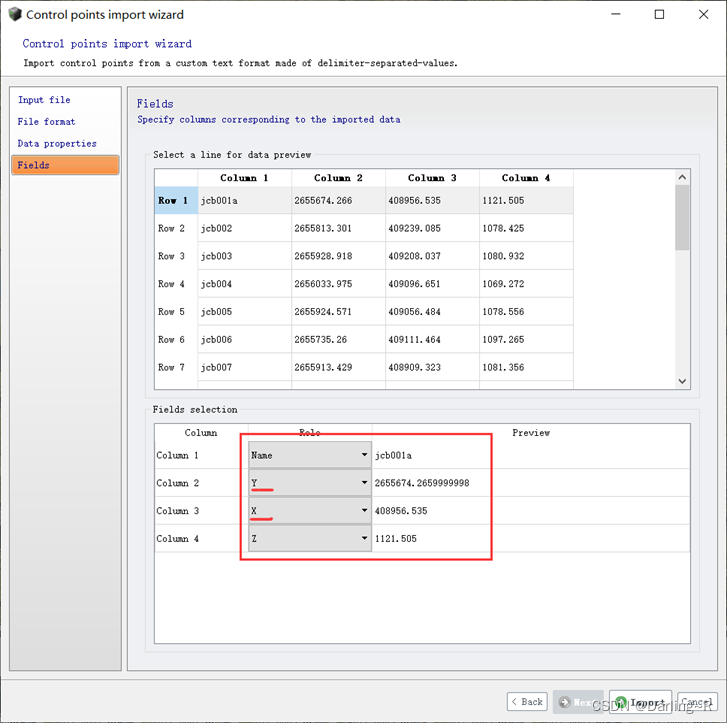
右侧的Survey Points中可以看到,控制点已经在右侧显示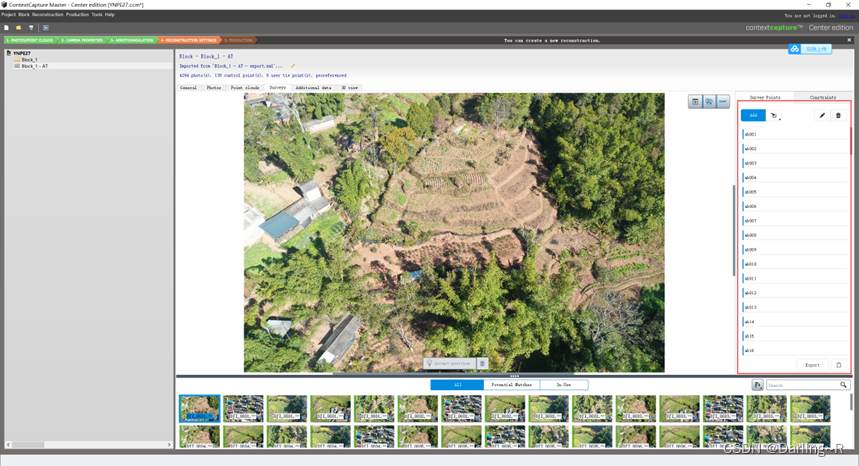
在3D view中查看控制点情况,删除多余的控制点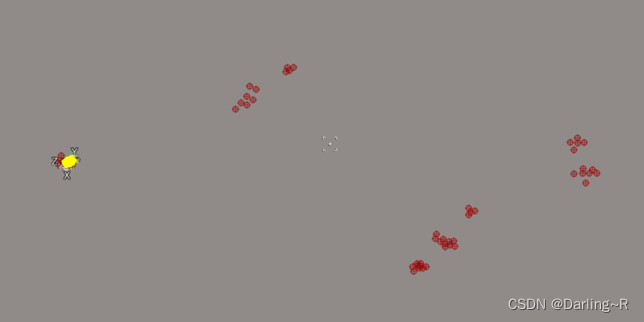
整体缩放到影像附近,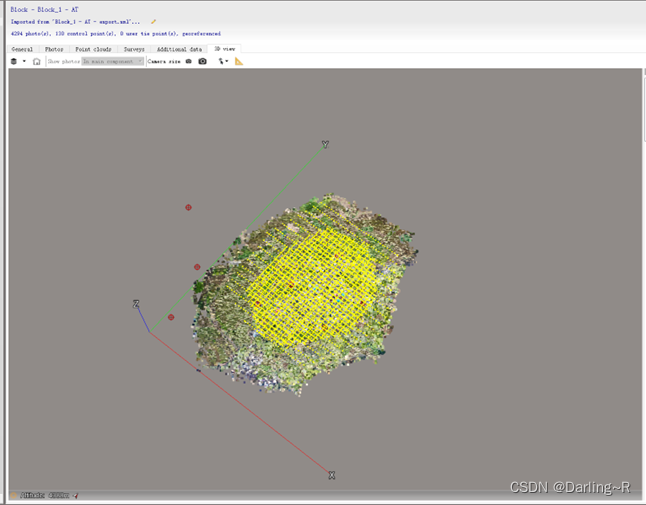
在显示栏中只保留Surveys,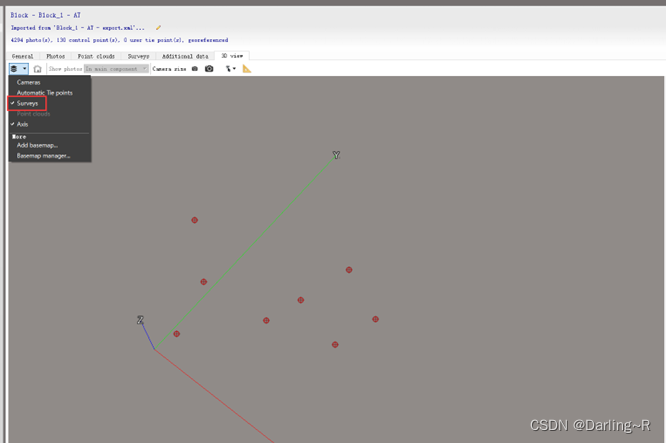
查看影像覆盖区域有哪些控制点,做好记录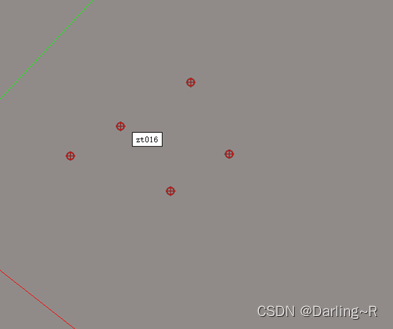
在Survey Points中选中其他不在影像覆盖区域的控制点,将其进行删除。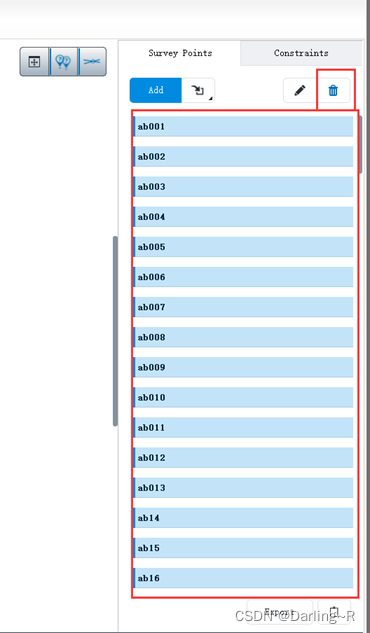
此时,只剩下影像覆盖区域下的控制点
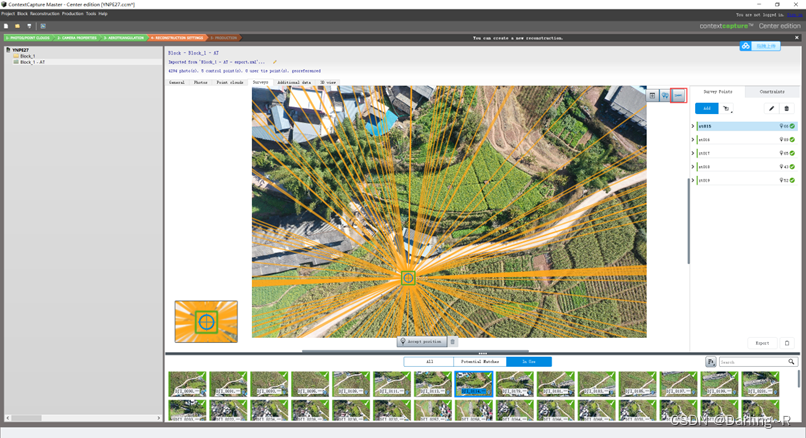
此时,控制点还没有刺点,显示为红色。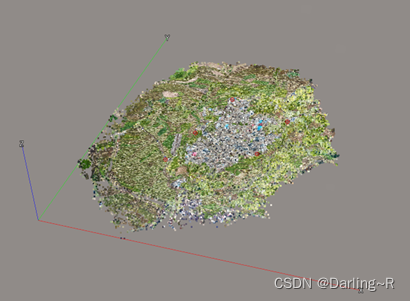
首先在右侧栏中选中要刺点,然后在下面的栏中选择Potential Matches,最后选中影像,看到有红色的L型控制点标志。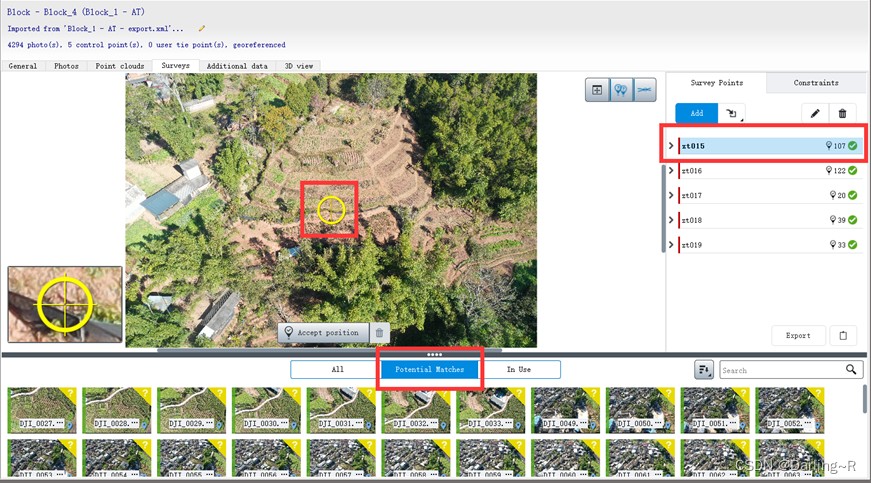
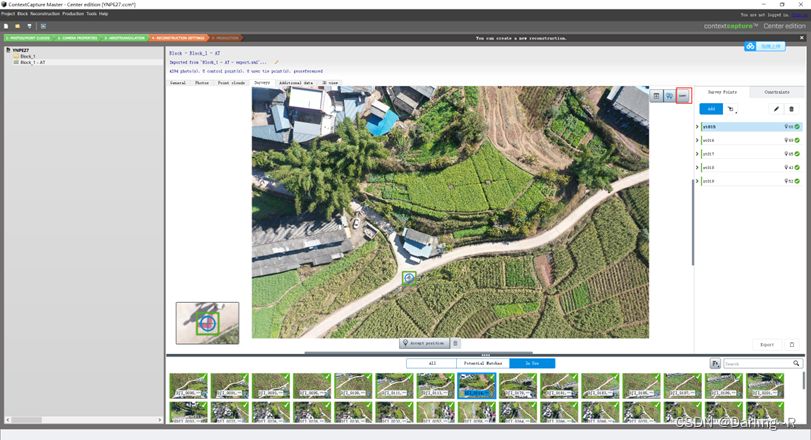
使用鼠标滚轮放大影像,然后将黄色标志中心移动到L型控制点的内角。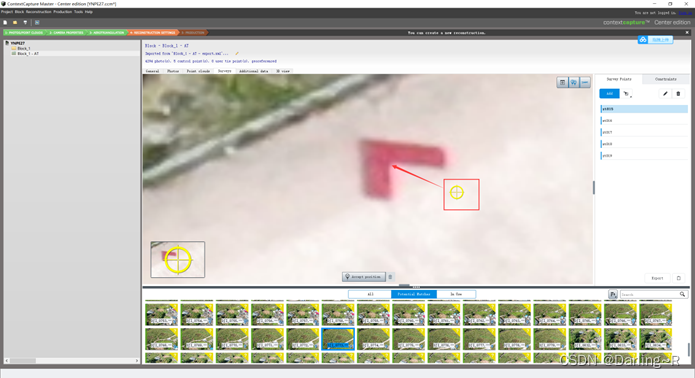
移动完成后,点击下方的Accept Matches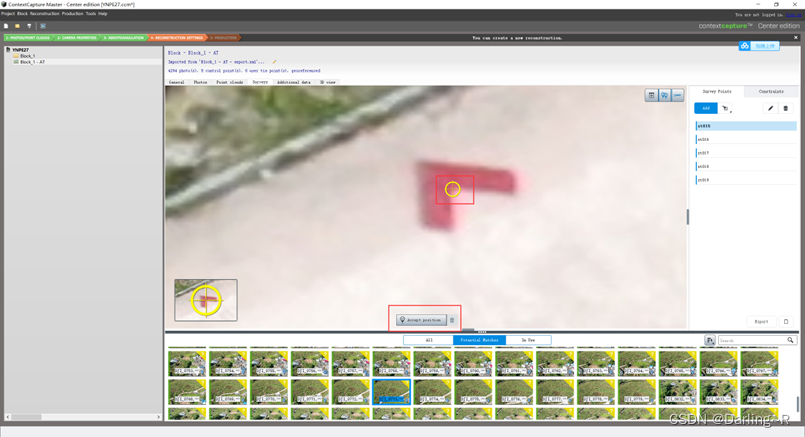
此时可以看到右侧zt015控制点下面已经有一张影像DJI_0773.JPG,在下面的影像栏中也可以看到DJI_0773.JPG右上角打了绿色的对号。接着重复上面的过程,刺下一个点。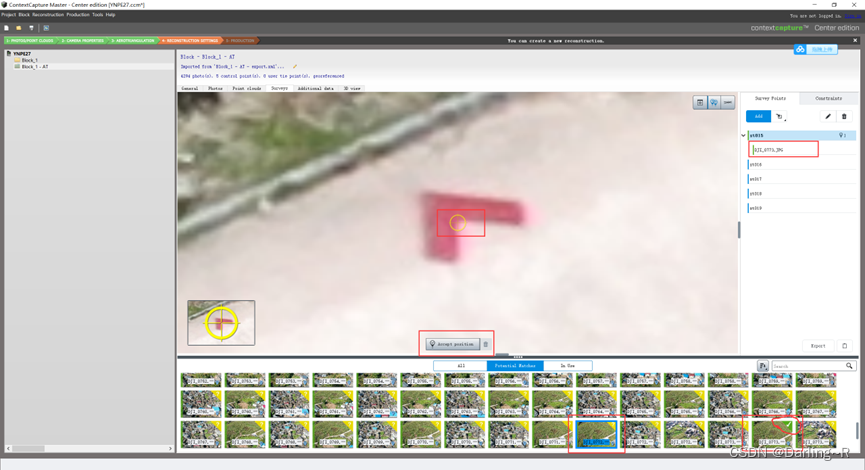
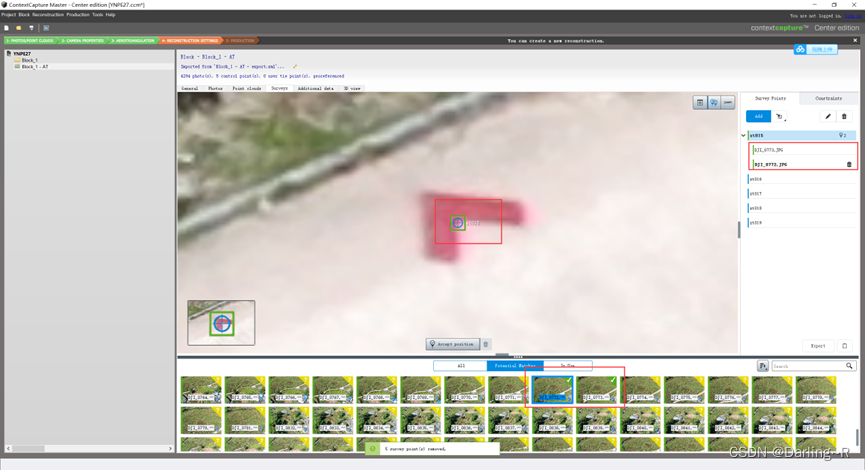
控制点完成刺点后,可以查看整体效果,查看是可以关闭核线显示状态。