PCL 使用ICP点云拼接
一、简介
ICP算法详解——我见过最清晰的解释_负壹的博客-CSDN博客
两个点集,source和target,target不变,source经过旋转(Rotation)和平移(Translation)甚至加上尺度(Scale)变换,使得变换后的source点集尽量和target点集重合,这个变换的过程就叫点集配准。
但是ICP的使用方法精度比较差,假如将一个原始点云在X方向上移动一定的距离(或者对原始点云进行降采样),然后进行配准分数也会有很大的差异,并且得到的旋转平移矩阵也差异比较大。
二、基本原理

假设用Qi,i=1,2,3,⋯Qi,i=1,2,3,⋯表示第一个点集,Pi,i=1,2,3,⋯Pi,i=1,2,3,⋯表示第二个点集。
ICP配准过程:
1.计算原始点云P中的每个点对于在匹配点云Q的最近点
2、 计算对应点的平均最小距离,计算R T 矩阵
3、对原始点云P进行RT转换得到P2
4、计算P2与Q之间的平均最小距离,继续迭代。
提示:这里的目标函数的要求,也可以是迭代次数
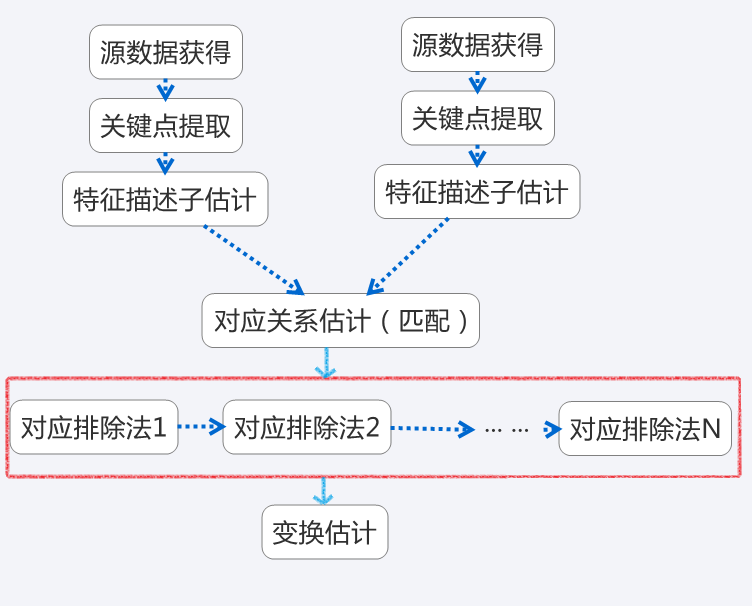
识别步骤:
1、分别找到两个点云数集中的兴趣点或者关键点
2、计算特征描述符
3、分别计算p1(x,y,z) p2(x,y,z)计算特征和位置之间的相关性,通过迭代测试来计算
4、计算之前一定要去除掉点云上面的噪声,ICP是暴力迭代的方法,计算内容是全部点云中的点
5、从特征点总找到一个匹配最好的特征计算出旋转平移矩阵
迭代最近点 Iterative Closest Point (ICP)
PCL学习笔记二:Registration (ICP算法)_rabbif的博客-CSDN博客
ICP采用最小二乘法的最优配准方法,此算法重复进行点之间的对应关系,计算出一个刚性变换,知道满足收敛的精度。
// ICP配准
pcl::IterativeClosestPoint<pcl::PointXYZ,pcl::PointXYZ>icp; // 创建ICP对象 用来ICP配准
//icp.setMaxCorrespondenceDistance(0.1); //
icp.setTransformationEpsilon(0.1); // 前一个变换矩阵和当前变换矩阵的差异小于阈值时,就认为已经收敛了,是一条收敛条件
icp.setEuclideanFitnessEpsilon(0.01); // 还有一条收敛条件是均方误差和小于阈值, 停止迭代
icp.setMaximumIterations(10); // 最大迭代次数
icp.setInputCloud(cloud_tr);
icp.setInputTarget(cloud_in); // 输入目标点云
icp.align(*cloud_icp); //配准后的点云transformation estimation是基于SVD的, SVD是奇异值分解
基本过程
对于目标点云中的每个点,匹配参考点云(或选定集合)中的最近点。
求得使上述对应点对计算均方根(root mean square,RMS)最小的刚体变换,求得平移参数和旋转参数。
使用获得的转换矩阵来转换目标点云。
迭代(重新关联点),直到满足终止迭代的条件(迭代次数或误差小于阈值)。这里的误差最小,可以是相邻两次均方根差的绝对值小于某一限差。
三、代码:
添加头文件
#define BOOST_TYPEOF_EMULATION //要加在#include <pcl/registration/icp.h>前
#include <pcl/registration/icp.h> //ICP配准类相关头文件 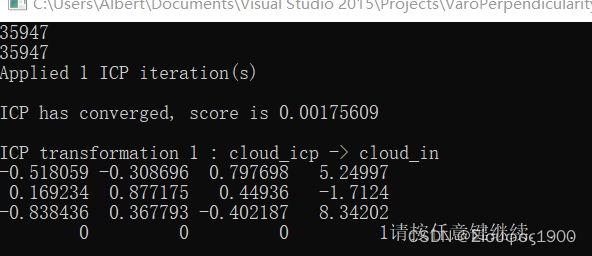
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in(new pcl::PointCloud<pcl::PointXYZ>);// 原始点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_icp(new pcl::PointCloud<pcl::PointXYZ>); // ICP 输出点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_tr(new pcl::PointCloud<pcl::PointXYZ>); // 匹配点云
string strfilepath = "C:\\Users\\Albert\\Desktop\\Binary.pcd";
if (-1 == pcl::io::loadPCDFile(strfilepath, *cloud_in)) {
cout << "error input!" << endl;
return -1;
}
cout << cloud_in->points.size() << endl;
string strfilepath2 = "C:\\Users\\Albert\\Desktop\\Binary2.pcd";
//if (-1 == pcl::io::loadPCDFile(strfilepath2, *cloud_icp)) {
// cout << "error input!" << endl;
// return -1;
//}
pcl::PointXYZ point;
for (int i = 0; i < cloud_in->size();i++)
{
point.x= cloud_in->points[i].x + 10;
point.y = cloud_in->points[i].y;
point.z = cloud_in->points[i].z;
cloud_icp->push_back(point);
}
cout << cloud_icp->points.size() << endl;
pcl::io::savePCDFileBinaryCompressed(strfilepath2,*cloud_icp);
int iterations = 3;// 默认的ICP的迭代次数
*cloud_tr = *cloud_icp;
// ICP配准
pcl::IterativeClosestPoint<pcl::PointXYZ,pcl::PointXYZ>icp; // 创建ICP对象 用来ICP配准
//icp.setMaxCorrespondenceDistance(0.1); //
icp.setTransformationEpsilon(0.1); // 前一个变换矩阵和当前变换矩阵的差异小于阈值时,就认为已经收敛了,是一条收敛条件
icp.setEuclideanFitnessEpsilon(0.01); // 还有一条收敛条件是均方误差和小于阈值, 停止迭代
icp.setMaximumIterations(10); // 最大迭代次数
icp.setInputCloud(cloud_tr);
icp.setInputTarget(cloud_in); // 输入目标点云
icp.align(*cloud_icp); //配准后的点云
if (icp.hasConverged())//icp.hasConverged ()=1(true)输出变换矩阵的适合性评估
{
std::cout << "\nICP has converged, score is " << icp.getFitnessScore() << std::endl;
}
else
{
PCL_ERROR("\nICP has not converged.\n");
return (-1);
}
cout<<icp.getFinalTransformation();