ElasticSearch学习篇18_《检索技术核心20讲》LevelDB设计思想
目录
一些常见的设计思想以及基于LSM树的LevelDB是如何利用这些设计思想优化存储、检索效率的。
- 几种常见的设计思想
- 索引和数据分离
- 减少磁盘IO
- 读写分离
- 分层思想
- LevelDB的设计思想
- 读写分离设计
- 分层设计与延迟合并
- LRU缓存加速检索
几种常见设计思想
索引与数据分离
索引和数据分离设计理念可以让索引保持简洁和高效,来帮助我们聚焦在索引的优化技术上。
比如对于无法完全加载到内存的数据,进行索引和数据分离之后就可以把索引加载进内存,进行高性能的访问,例如B+树、BKD树就是基于这一设计思想。
如果索引和数据能够完全加载到内存中了,还需要进行索引和和数据分离吗?需要根据实际情况考虑,比如像ES的索引设计,根据关键词创建的倒排索引,存储的是docId,一般在多关键词、条件检索的时候,需要对docId取交集,最终的docId确定之后,然后在根据docId去正排索引找对应的文档数据。若是索引和数据不分离,
- 那么会增加额外的存储开销,不需要在posting list中重复记录文档所有数据。
- 不能减少检索过程的数据复制代价,如果存储不只是docId,每次都需要复制数据,然后单独取出docId进行运算。
- 不能保持索引的简洁高效,比如只存储docId的posting list可以使用位图bitmap进行检索加速,并且压缩存储空间,或者优化的Roaring Bitmap结构,关于Roaring Bitmap参考往期博客:ElasticSearch学习篇12_《检索技术核心20讲》基础篇_elasticsearch位运算-CSDN博客。
若是数据和索引分离,同样会带来些问题,比如数据的不一致,比如数据已经被修改或者删除了,但是索引还没来得及更新,就会有问题,对于这种情况的容忍程度,需要结合具体的业务情况判断,比如一些不重要的场景可以容忍临时性数据不一致,但是对于一些金钱转账的场景,就要求强一致,不能容忍,这时候就得加锁,为了锁的粒度更小,就适合索引和数据不分离。
举例如MySQL的MyISAM就是索引和数据分离的,InnoDB就是聚集索引和数据不分离的,因此InnoDB不需要加全局表锁来保证数据一致性,他只需要支持行级的锁就可以了。
减少磁盘IO
对于数据无法全部存在内存只中的情况,必然会涉及磁盘的读写操作,在这种情况下应该尽可能减少磁盘IO。
一种常见的是将频繁访问的数据加载进内存,比如前面索引和数据分离之后,可以把索引加载进内存,对于内存无法装下的索引,可以使用占用内存较小的数据索引结构,如具有压缩性质的前缀树这类数据结构来压缩索引,前缀树替换跳表、哈希表这种就是以性能换空间思路。最典型的例子就是 lucene 中用 FST(Finite State Transducer,中文:有限状态转换器)来存索引字典。参考:关于Lucene的词典FST深入剖析 - 苍青浪 - 博客园
另外一个就是尽量保证磁盘顺序IO,可以通过预写日志以及利用磁盘的局部性原理来加快随机IO的效率。比如基于LSM树的Hbase、Kafka都是利用这些设计思想。
关于SSD磁盘和内存IO效率仍然会有1-2个数量集的差距,并且SSD的顺序IO效率仍然是快于随机IO的,让我们先来了解一下 SSD 的工作原理。对于 SSD 而言,它以页(Page,一个 Page 为 4K-16K)为读写单位,以块(Block,256 个 Page 为一个 Block)为垃圾回收单位。由于 SSD 不支持原地更新的方式修改一个页,因此当我们写数据到页中时,SSD 需要将原有的页标记为失效,并将原来该页的数据和新写入的数据一起,写入到一个新的页中。那被标记为无效的页,会被垃圾回收机制处理,而垃圾回收又是一个很慢的操作过程。因此,随机写会造成大量的垃圾块,从而导致系统性能下降。所以,对于 SSD 而言,批量顺序写的性能依然会大幅高于随机写。
读写分离
在高并发场景下,为了避免对数据的加锁导致系统性能降低,而读写分离给数据创建一个读副本、写副本,可以避免数据读写不安全。举例MySQL的master-slave结构,主接受写数据,定期同步数据到从,然后请求读从节点数据。包括在LevelDB中,MemTable - Immutable MemTable 的设计,其实也是读写分离的一个具体案例。
分层处理
在大规模检索系统中,不同数据的价值是不一样的,如果都用同样的处理方式可能会造成资源的浪费,因此将数据分层处理是一种思想。
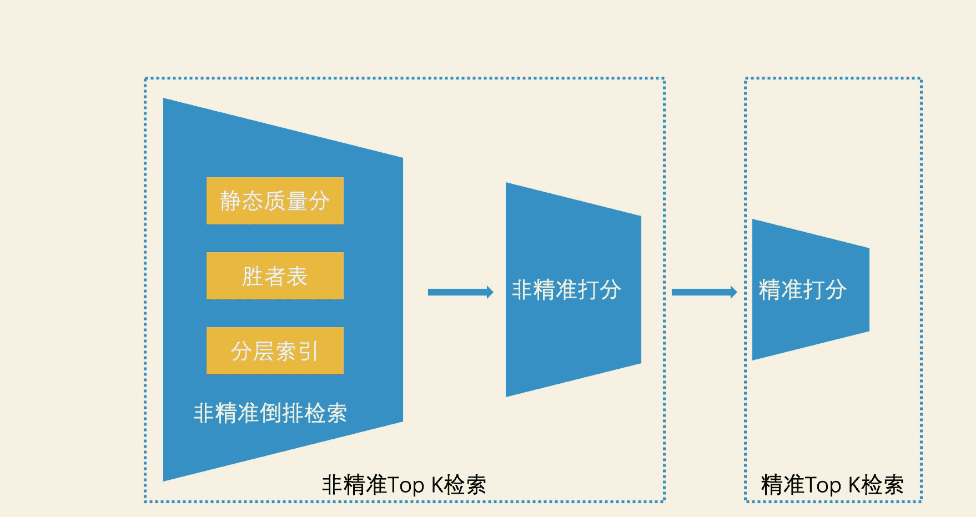
比如非精确TopK的检索结果才进行计算打分,然后作为精确TopK检索结果。比如上面的将索引、数据分离也是一种分层思想,比如LSM树吧最近频繁访问的数据放入内存,然后把其他数据放入磁盘也是分层思想,甚至CPU的一二级缓存同样也是。
LevelDB的设计思想
LevelDB 是基于 LSM 树优化而来的存储系统。关于LSM树可参考往期博客:
ElasticSearch学习篇13_《检索技术核心20讲》进阶篇之LSM树_elasticsearch lsm-CSDN博客。
LSM 树会将索引分为内存和磁盘两部分,并在内存达到阈值时启动树合并。但是,这里面存在着大量的细节问题。比如说
- 数据在内存中如何高效检索?
- 数据是如何高效地从内存转移到磁盘的?
- 以及我们如何在磁盘中对数据进行组织管理?
- 有数据是如何从磁盘中高效地检索出来的?
先大概总结一下
- 首先,在内存中检索数据的环节,LevelDB 使用跳表代替 B+ 树,提高了内存检索效率。
- 其次,在将数据从内存写入磁盘的环节,LevelDB 先是使用了读写分离的设计,增加了一个只读的 Immutable MemTable 结构,避免了给内存索引加锁。
- 然后,LevelDB 又采用了延迟合并设计来优化归并。具体来说就是,它先快速将 C0 树落盘生成 SSTable 文件,再使用其他异步进程对这些 SSTable 文件合并处理。而在管理多个 SSTable 文件的环节,LevelDB 使用分层和滚动合并的设计来组织多个 SSTable 文件,避免了 C0 树和 C1 树的合并带来的大量数据被复制的问题。
- 最后,在磁盘中检索数据的环节,因为 SSTable 文件是有序的,所以我们通过多层二分查找的方式,就能快速定位到需要查询的 SSTable 文件。
- 接着,在 SSTable 文件内查找元素时,LevelDB 先是使用索引与数据分离的设计,减少磁盘 IO,又使用 BloomFilter 和二分查找来完成检索加速。
- 加速检索的过程中,LevelDB 又使用缓存技术,将会被反复读取的数据缓存在内存中,从而避免了磁盘开销。
读写分离设计
对于LSM的内存树C0,LevelDB第一个对LSM的改进就是使用跳表代替B+树,因为跳表对于增删的效率是优于B+树的。
归并时候的内存一致性问题:对于LSM的内存树C0数据满之后,需要合并到磁盘树C1 , 该过程是滚动Rolling Merge(按照分页块一次读取磁盘树的多个连续块数据到清空块,然后把内存和磁盘归并完成数据块写入新的块,待会顺序写入磁盘新位置),若在此过程遇到数据修改,即需要修改内存树C0,如何保证数据的一致性?
避免加锁
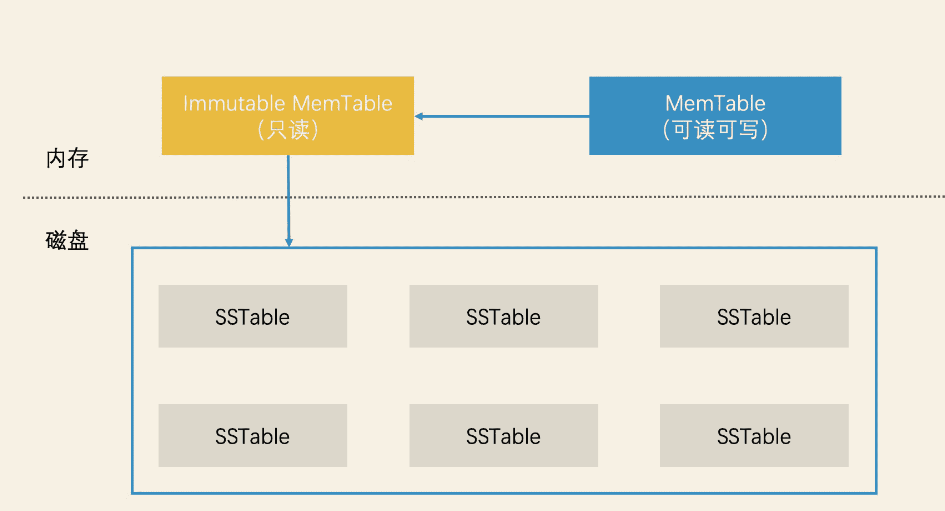
对于归并时候的内存数据一致性问题,LevelDB第二个改进就是使用读写分离的设计思想,避免加锁影响数据检索效率,具体的做法就是它将内存中的数据分为两块,一块叫作 MemTable,它是可读可写的。另一块叫作 Immutable MemTable,它是只读的。这两块数据的数据结构完全一样,都是跳表,如何避免加锁保证数据一致性?
- 当MemTable满了之后,把它切换为 Immutable MemTable,接受读请求。
- 另外准备一块新的 New MemTable来接受写请求。
此时Immutable MemTable和磁盘树C1进行归并,因为是只读的,不用在归并期间加锁,另外就是新的修改数据,写入了新的MemTable,读请求的时候会读依次内存中的 新的MemTable 、Immutable MemTabe 以及磁盘中的数据,保证读数据的实效性是最新的。
分层设计与延迟合并
延迟合并
LevelDB对于归并过程的优化,并不是直接在内存中拿着C0和C1进行归并再写入磁盘,因为这样会有一些问题
- 合并代价很高:因为C1树很大,C0树很小,尽管有Rolling Merging,还是会发生大量测磁盘IO
- 合并频率很频繁:因为因为C1树很大,C0树很小,会频繁的进行合并
因此LevelDB采用一种延迟合并的设计,具体来说就是,先将 Immutable MemTable 顺序快速写入磁盘,直接变成一个个 SSTable(Sorted String Table)文件,之后再对这些 SSTable 文件进行合并。这样就避免了 C0 树和 C1 树昂贵的合并代价,进而磁盘树C1就被多个小的SSTable代替了。
延迟合并多个SSTable会带来检索方面的问题,LevelDB使用分层设计思想解决检索效率问题。
分层设计
单个SSTable的数据来自Immutable MemTable,所以单个SSTable内数据的key是有序的,查找的时候可比较高效,但是SSTable之间的数据范围可能是交叉的,因此这样情况下,查找的时候并不能定位出该去哪个SSTable中查找执行的数据,最差的情况需要遍历查找全部的SSTable,磁盘IO开销影响检索效率。
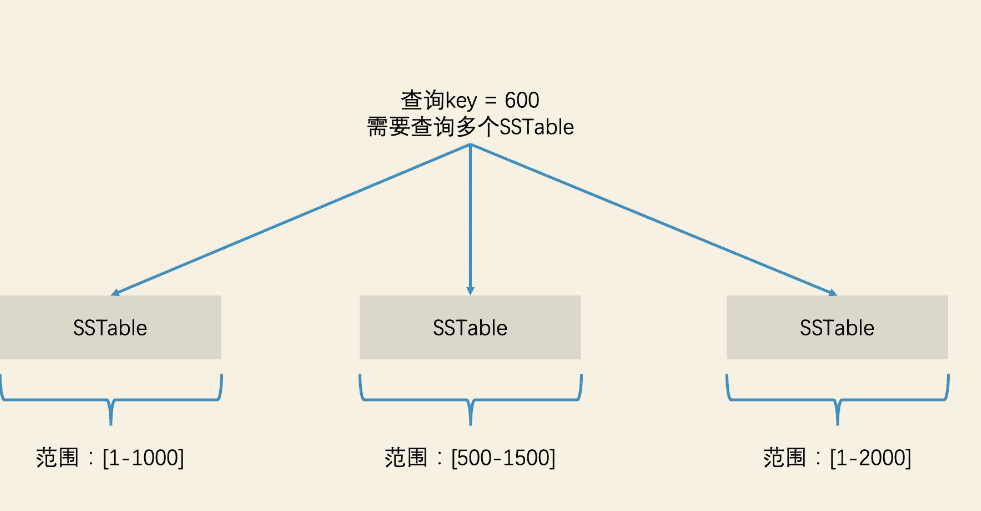
解决的思路就是需要整理SSTable文件数据进行重新划分,让每个SSTable的存储的数据范围不交叉,以便进行如二分等快速检索。
如何保证SSTable存储数据范围不是交叉的?当系统生成超过SSTable的时候,这个时候就要整理,首先计算新的SSTable的数据范围,之后使用多路归并的方式生成新1个或者多个SSTable文件(可能会涉及SSTable数据节点的分裂),并且保证已生成的SSTable之间是排序的,同时LevelDB控制每个SSTable的大小(比如2M),太大的话检索效率也会降低。
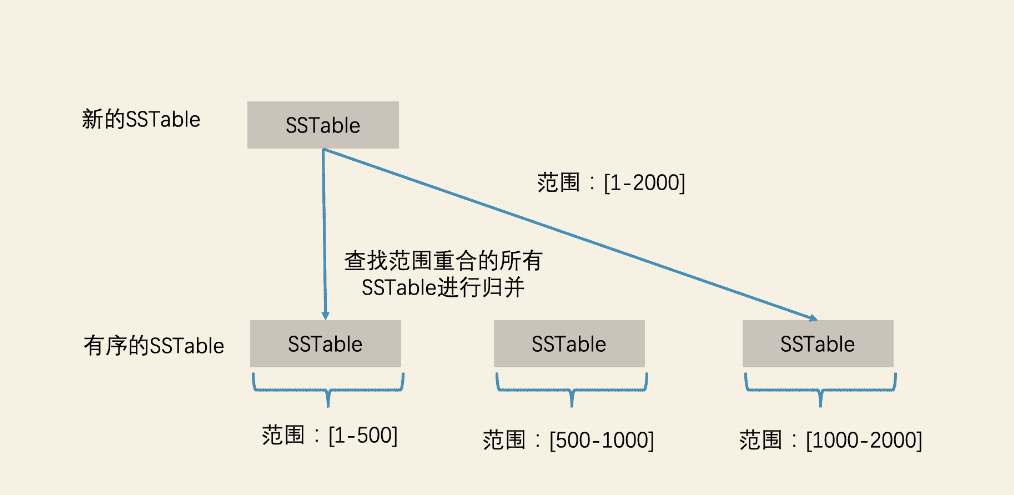
归并的时候,如果SSTable数量太多也会影响效率,最差的就是一个新的SSTable数据范围太广,需要归并到所有已有的SSTable中,LevelDB基于分层思想使用滚动合并来避免大量数据的无效复制,具体的就是将SSTable分层管理,然后逐层合并,这就是LevelDB的分层思想。
为了防止SSTable的数量不断增加,合并策略很关键,主要介绍两种基本策略:size-tiered和leveled
- size-tiered 策略:size-tiered策略保证每层SSTable的大小相近,同时限制每一层SSTable的数量。如上图,每层限制SSTable为N,当每层SSTable达到N后,则触发Compact操作合并这些SSTable,并将合并后的结果写入到下一层成为一个更大的sstable。由此可以看出,当层数达到一定数量时,最底层的单个SSTable的大小会变得非常大。并且size-tiered策略会导致空间放大比较严重**。**即使对于同一层的SSTable,每个key的记录是可能存在多份的,只有当该层的SSTable执行compact操作才会消除这些key的冗余记录。
- leveled策略:限制每一层的SSTable总文件大小。
LevelDB使用的是leveled策略,当从Immutable MemTable 转成的SSTable会被放在Level 0层,Level 0层最多可以放四个SSTable,当level0 层满了之后,需要进行多路归并生成新的多个SSTable,作为level 1层,接下来如果level 0层又来了4个新的SSTable,那么就要和level 1层相关的SSTable进行多路归并合并,如果Level1层的SSTable数量太多,效率就会比较低,因此使用leveled策略,限制level1层的总文件大小(默认为10M)。
当 Level 1 层的 SSTable 文件总容量达到了上限之后,我们就需要选择一个 SSTable 的文件,将它并入下一层(为保证一层中每个 SSTable 文件都有机会并入下一层,我们选择 SSTable 文件的逻辑是轮流选择。也就是说第一次我们选择了文件 A,下一次就选择文件 A 后的一个文件)。下一层会将容量上限翻 10 倍,这样就能容纳更多的 SSTable 了。依此类推,如果下一层也存满了,我们就在该层中选择一个 SSTable,继续并入下一层。这就是 LevelDB 的分层设计了。

尽管限制了每层的文件总容量大小,能保证开销上限,但是随着层数的增加,底层的SSTable会越来越多,合并的时候数量太多有大量磁盘IO,LevelDB通过加入一个限制,就是当新生成第N层的新的SSTable之后,需要判断又再加数据会不会导致范围过广,及时止损,如果判断和N+1层的SSTable范围交叉了10个,那么就不在往这个SSTable加数据,结束这个SSTable的继续生成,继续生成一个新的SSTable,直到所有需要合并的数据都完成合并为止。这种设计可以有效限制每次合并操作需要处理的数据量,避免过度的IO操作,提高性能。
举个例子,假设我们有一个LevelDB数据库,其中:
- 第n层(Level n)有几个SSTable文件,我们称之为A, B, C。
- 第n+1层(Level n+1)有一系列SSTable文件,称之为1, 2, 3, …, 15。
合并的过程如下:
- 开始合并: 我们从第n层选择一个SSTable文件,比如A,尝试与第n+1层的文件进行合并。
- 检查重合覆盖度: 假设在这个过程中,我们发现要合并A和第n+1层文件时,与文件1到文件12都有键区间重合。这时重合覆盖度是12。
- 达到限制: 因为重合覆盖度超过了预设限制10,LevelDB决定不合并与文件12及后续的文件。
- 生成当前SSTable文件: 不继续合并A和第12个及其后续的文件,而是生成一个新的SSTable文件作为合并A和文件1到文件11的结果。
- 继续合并: 由于合并过程被分段处理,接下来LevelDB并没有停下来,而是继续从第n层的剩余数据开始(假如是A中未处理完的部分),尝试进行与第n+1层文件12及后续文件的新的合并。这会创建下一批SSTable文件。
这样,LevelDB在合并过程中通过分段合并和限制单个合并操作的范围,可以有效管理磁盘IO,提高合并效率,避免单次合并处理过多数据导致的性能问题,避免**无限制合并:** 系统试图将第n层的一个大SSTable文件与第n+1层的所有重叠的SSTable文件进行合并。假如在第n+1层有20个SSTable文件,这意味着一次合并可能涉及大量的文件操作。
检索的时候也是分层的,先从多个SSTbale找目标SSTable,
- 首先检索level 0 层的4个SSTable,需要全部遍历
- 接着按照二分检索level1层之后的SSTable,定位到指定SSTable接着查找。
然后在利用SSTable内部索引和数据分离的设计加速检索,下面是SSTable的数据结构
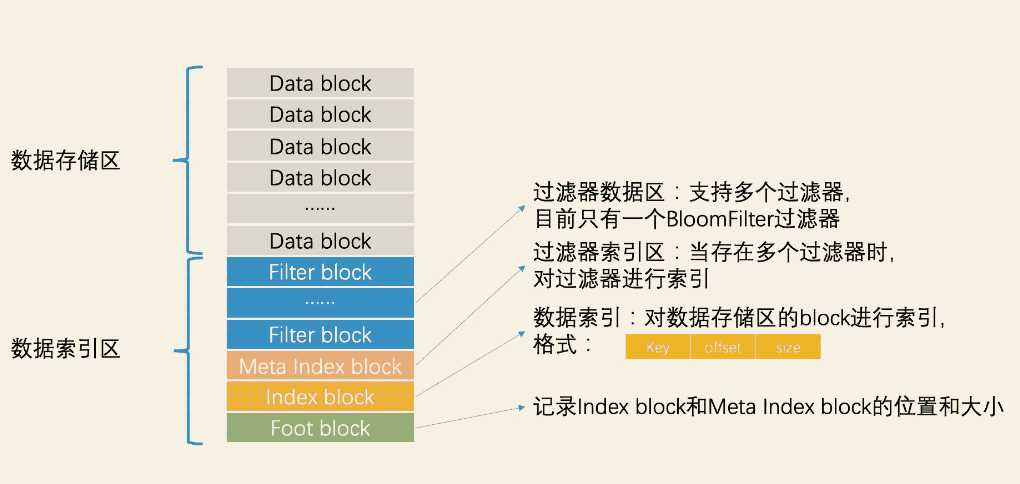
在读取SSTable文件的时候,不需要全部读进内存,只需要读取索引到内存,
- 快速判断元素是否存在当前SSTable:首先根据过滤器索引MetaIndex block读取如BloomFilter过滤器,快速判断元素是否存在。
- 精确查找元素:如果元素存在,根据数据区索引 Index block读取 每个data block 的最小分隔key(便于计算key范围)、起始位置、block的大小(类似Redis的压缩结构ziplist),根据index和data的指针关系,直接二分查找key,然后再去data block数据区取数据。
举个精确查找例子,假设有一个包含多个键值对的SSTable文件,数据分布在多个Data Block中,而Index Block保存了这些Data Block的偏移信息。
- 查找某个键: 假设需要查找键“K123”。
- 加载Index Block: 首先,系统会加载SSTable文件的Index Block到内存中。Index Block中保存了每个Data Block的键范围和偏移位置。
- 二分查找索引: 在Index Block中,通过二分查找快速定位哪个Data Block可能包含键“K123”。假如找到Data Block B,其键范围覆盖了“K123”。
- **加载Data Block:**然后,系统使用Index Block中提供的信息,从磁盘中读取Data Block B到内存中。
- 查找键值对: 在内存中对已加载的Data Block B进行二分查找以找到确切的键“K123”及其对应的值。
性能考量
- 减少磁盘IO: 通过Index Block来减少需要访问的Data Block数量,避免将整个SSTable加载到内存中。
- 提高查找速度: 二分查找加上Index Block的使用能大幅提高查找速度,因为它减少了磁盘访问次数、提高了数据访问的效率。
虽然每次查找都需要加载Index Block和相应的Data Block,这种分段的读取还是比线性扫描整个文件高效得多。此外,常用的索引块可能会被缓存到内存中,某种程度上减少了重复的磁盘读取,从而进一步加快查找速度。
LRU缓存加速检索
上面说SSTable内的精确检索,每次二分的期间会需要将Index Block以及对应的Data Block加载到内存,有时候还可能会导致需要将多个Data block加载到内存,可能会涉及多次IO。
在查询特定键的过程中,通常不需要多次加载多个Data Block到内存,理想情况下只需加载一个Data Block即可。不过,这也取决于数据的分布和访问的具体情况。以下是详细解释:
- 单个Data Block加载:
- 在典型情况下,如果索引块很好地组织和设计,查找某个键时,通过Index Block的二分查找可以确定目标键所处的单个Data Block。
- 然后,从磁盘中加载这个Data Block到内存,进行进一步的查找以获取具体的键值对。
- 多次加载Data Block的情况:
- 在某些情况下,如果数据查询模式导致多个查询在彼此非常接近的位置,并且横跨了多个Data Block,可能会连续加载多个Data Block。例如:
- 如果查找的键正好位于Data Block的边界附近,且索引不够精确,可能需要访问两个Data Block。
- 一次操作需要访问多个连续键(例如范围查询),而这些键跨越了多个Data Block。
优化措施
为了减少多次加载Data Block的需求,系统可能:
- 索引缓存:缓存索引信息,避免每次查找都访问磁盘上的索引块。
- 数据块缓存:使用内存缓存来存储常用的Data Block,减轻磁盘IO。
- 预读取和分片:在可能的情况下,系统可以预先将相邻的块读入内存,以减少后续的磁盘访问。
总的来说,通过合理使用索引和缓存机制,可以有效减少多次加载多个Data Block的需要,优化查找效率并提高系统性能。
因此LevelDB使用LRU缓存来优化减少磁盘IO的次数,针对这两次读磁盘操作,LevelDB 分别设计了 table cache 和 block cache 两个缓存。其中,这两个缓存都使用 LRU 机制进行替换管理。
- block cache 是配置可选的,它是将最近使用的 Data Block 加载在内存中。
- table cache 则是将最近使用的 SSTable 的 Index Block 加载在内存中。