LFM雷达及USRP验证【章节5:USRP实际测试】
1. 实验原理
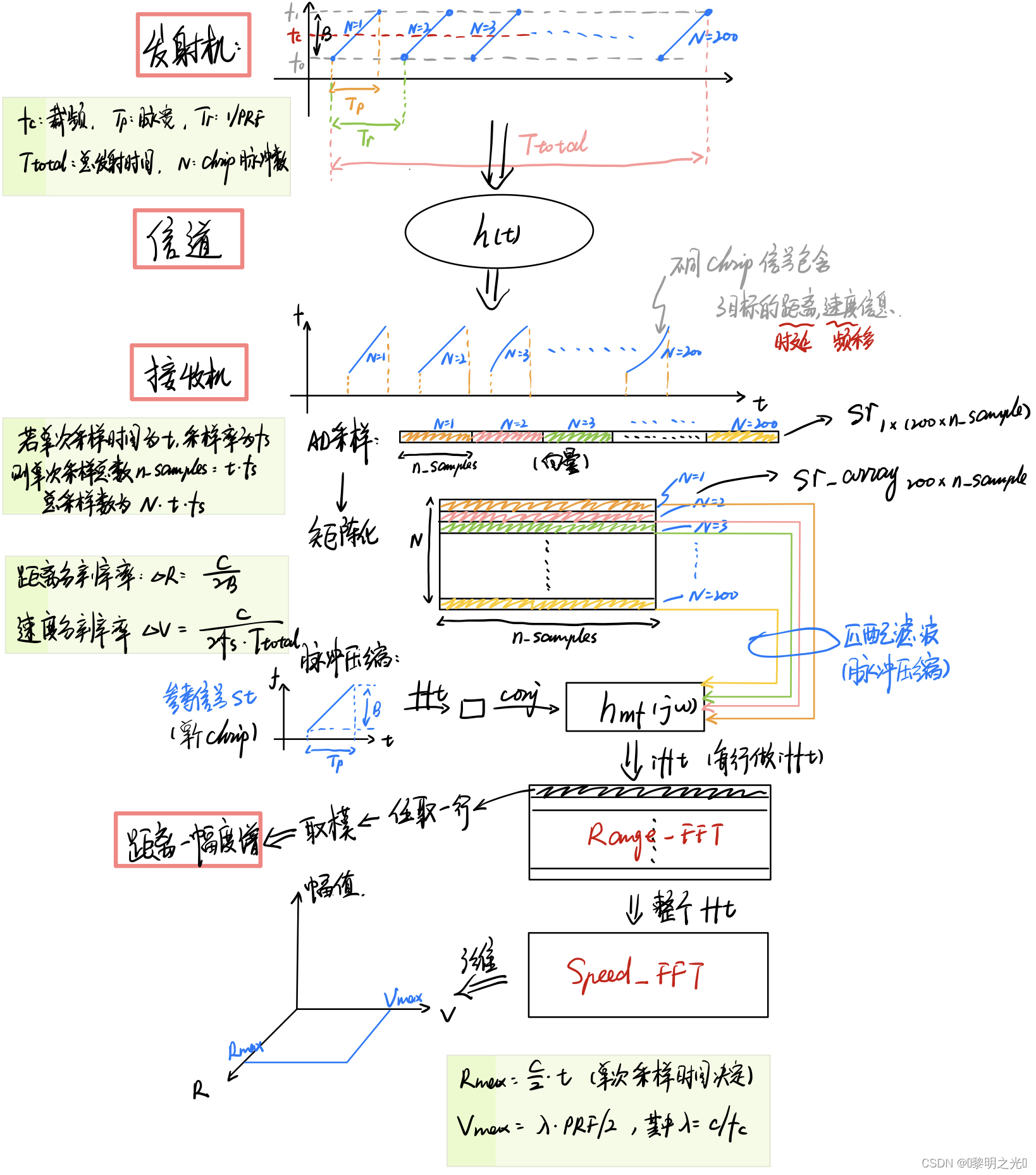
USRP发送200次LFM脉冲,对每次接收到的信号进行采样,每一采样点数为N,接收端将采样得到的离散回波信号构成200*N维矩阵,按照章节3的实现原理,对矩阵的每一行进行脉冲压缩,得到Range-FFT(距离幅度谱),在对Range-FFT进行傅里叶变换得到Speed-FFT,进而实现LFM雷达的测距测速,实验流程图如下:
2. USRP实验环境
2.1 USRP原生参数
| 参数名 | 参数含义 |
| Fc | 射频载波频率(4GHz) |
| fs | USRP采样率200MHz(这已经是最大采样率) |
| B | B=0.4fs=80MHz(带通信号要满足带奎斯特采样定律) |
| PRF | USRP发射脉冲的速率,我们设置为一秒发射100次 |
| N_Tx _samples | 发射一次脉冲的采样点数4096(必须为4096的整数倍) |
| N_Rx_samples | 接收一次脉冲的采样点数4096(必须为4096的整数倍) |
单次采样点数会决定雷达的最大检测距离。
2.2 LFM波形参数
| 参数设置 | 参数含义 |
| Tp | 一个Chrip信号的时宽1us,Tp=1e-6 |
| PRF | 每秒脉冲重复频率为100 |
| Tr | 脉冲重复周期等于1/PRF=10ms |
| Kr | 调频率Kr=B/Tp=4e14 |
| t | 采样时间t=N_Tx_samples/fs=4096/200M=20.48us |
| Rmax | 最大检测距离(受到采样时间的限制)Rmax = c/2*t=3072m |
| R_resolution | 距离分辨率=c/2B=1.875m |
3. 上位机matlab代码
3.1 发射机代码
%==========================================================================
%% USRP_Tx
% 单个LFM
%% USRP 参数
% 采样率200MHz,带宽80MHz,采样点数4096,采样时间20.48us
%% LFM 参数
% 时宽1us,带宽80MHz,最大检测距离
%==========================================================================
clear;clc;close all;
%% LFM参数设置
fc = 4e9; %载波频率
PRF = 100; %脉冲重复频率
Tr = 1/PRF; %脉冲重复周期
Fs = 200e6; %采样频率
B = 0.4*Fs; %带宽
Ts = 1/Fs; %采样时间
Tp = 1e-6; %脉宽1000ns
c = 3e8; %光速
lamda = c/fc; %载波波长
Kr = B/Tp; %调频斜率
N_LFM = 100;
N_samples = 4096; %采样点个数
sample_t = N_samples/Fs; %采样时间
Total_sample_t = sample_t*N_LFM; %总发射时间
t = linspace(0,sample_t,N_samples); %采样时间离散化
Rmax = c/2*sample_t; %最大检测距离(受到采样时间的限制)
R_resolution = c/(2*B); %距离分辨率
Vmax = lamda*PRF/2; %目标最大速度,最大测速范围满足在第一盲速之内
%% Tx LFM波形生成
LFM_Tx = rectpuls(t-Tp/2,Tp).*exp(1i*pi*Kr*(t-Tp/2).^2); %时域Tx
单个LFM波形仿真
重复发射单个脉冲100次,一共得到4096*100个数据点
3.2 接收机代码
接收到100*4096个数据点后需要首先进行串并转换
%==========================================================================
%% USRP_Rx
% 单个LFM
%% USRP 参数
% 采样率200MHz,带宽80MHz,采样点数4096,采样时间20.48us
%% LFM 参数
% 时宽1us,带宽80MHz,最大检测距离
%==========================================================================
clear;clc;close all;
%% LFM参数设置(与Tx保持一致)
fc = 4e9; %载波频率
PRF = 100; %脉冲重复频率
Tr = 1/PRF; %脉冲重复周期
Fs = 200e6; %采样频率
B = 0.4*Fs; %带宽
Ts = 1/Fs; %采样时间
Tp = 1e-6; %脉宽1000ns
c = 3e8; %光速
lamda = c/fc; %载波波长
Kr = B/Tp; %调频斜率
N_LFM = 100;
N_samples = 4096; %采样点个数
sample_t = N_samples/Fs; %采样时间
Total_sample_t = sample_t*N_LFM; %总发射时间
t = linspace(0,sample_t,N_samples); %采样时间离散化
Rmax = c/2*sample_t; %最大检测距离(受到采样时间的限制)
R_resolution = c/(2*B); %距离分辨率
Vmax = lamda*PRF/2; %目标最大速度,最大测速范围满足在第一盲速之内
R_range = c*t/2; %在采样时间内,距离的范围
%% 接收回波信号 100*4096个数据点
LFM_Rx = rand(1,N_LFM*N_samples); %假设得到了串行数据流
LFM_s2p = reshape(LFM_Rx,N_samples,N_LFM).'; %串并转换(每一行表示一个LFM回波的4096个数据点,一共100行)
%% Rx 匹配滤波参考波形生成
LFM_reference = rectpuls(t-Tp/2,Tp).*exp(1i*pi*Kr*(t-Tp/2).^2); %时域Tx
%% 每一行进行匹配滤波
LFM_reference_f = conj(fft(LFM_reference));%匹配滤波器的频域特性
for i=1:N_LFM
LFM_mf(i,:)=ifft(fft(LFM_s2p(i,:)).*LFM_reference_f); %分别对每一行脉冲压缩 频域脉冲压缩(匹配滤波mf)
end
%% 图像输出
%----------------------------测距(Range FFT)------------------------------
% 第一个回波信号的距离幅度谱
figure(1);
plot(t*c/2,abs(LFM_mf(1,:)))
title('第一个回波信号的距离幅度谱');
%----------------------------测速(Speed FFT)------------------------------
LFM_speed=fft(LFM_mf,[],1);
V=linspace(0,PRF,N_LFM)*lamda/2;
% 尝试着画一下三维图
figure(4)
mesh(R_range,V,abs(LFM_speed)/max(max(abs(LFM_speed))));
xlabel('距离/m');
ylabel('速度/(m/s)');
zlabel('幅度/db');
title('目标距离速度信息一览');
4. USRP收发测试
接收机参考电平Reference Level由下式计算
%% 弗里斯传输公式Lbs
%% 接收端信号强度dBm RSS
clear;clc;close all;
fc = 4000; %单位MHz
R = 0.1; %距离,单位km
c = 3e8;
lamda = c/fc;
Pt = 10;%dBm
Gt = 15.5;%dB
Gr = 15.5;
Lc = 0;
Lbf = 32.5+20*log10(fc)+20*log10(R);%单位dB
RSS = Pt + Gt + Gr - Lc - Lbf; %单位dBm因此,我们检测范围在0.05km内,发射机功率为5dBm,天线增益为15.5dB时,接收机接收功率为-43dBm左右,因此我们可以将接收机电平设置为-45dbm。
- IQ信号流盘
我们存100次LFM回波,每个LFM回波由4096个IQ数据点构成,一共409600个数据点
4.1 USRP数据发射
外场测试环境

发射~~~biu~~~biu~~biu~
发射机幅度谱如下图所示
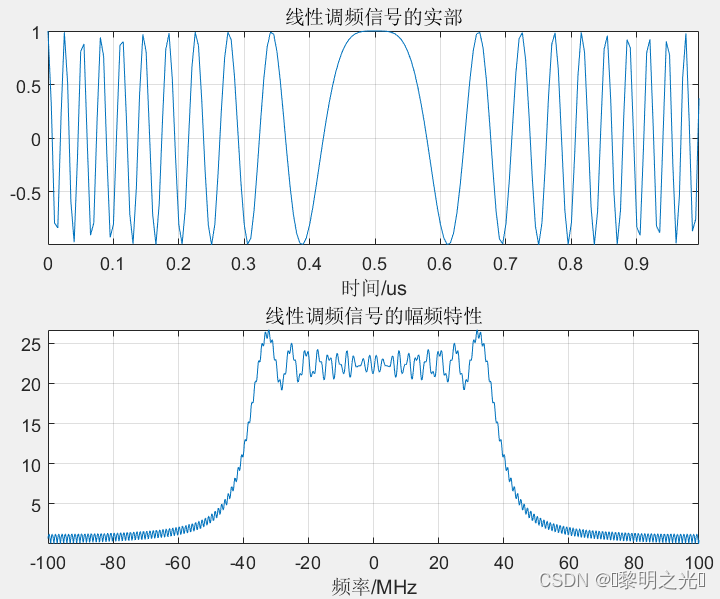
| 仿真得到的时域波形及幅度谱 | USRP发射信号的幅度谱【真实】 |
 | 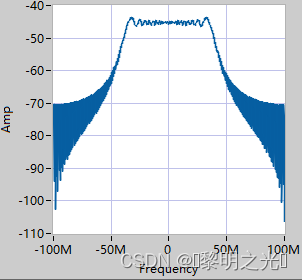 |
分析:从右图USRP实际发射的LFM波形的幅度谱可知,在中心频点(4GHz)两侧各有约40MHz左右的带宽,总带宽为80MHz,与我们设置参数一致。
4.2 USRP接收机信号处理
将接收到的数据点进行串并转换,并对每一行进行脉冲压缩
- 仿真结果
| 幅度谱 | 距离速度谱 |
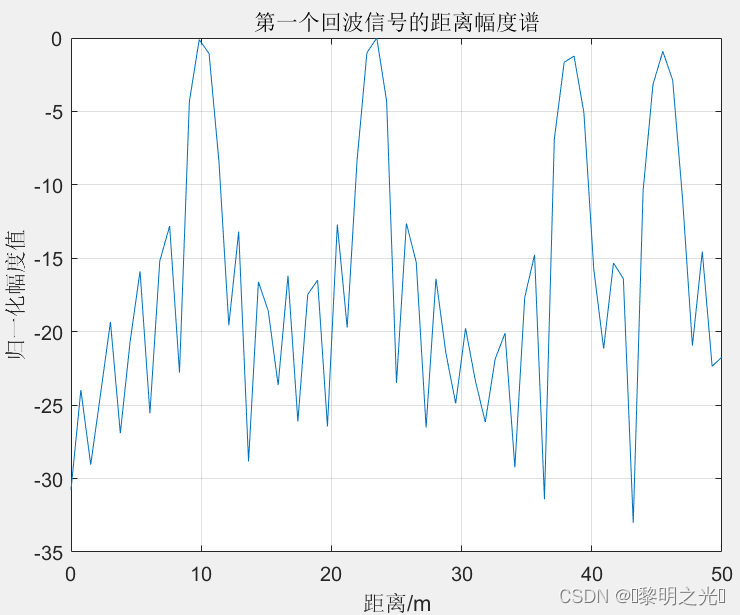 | 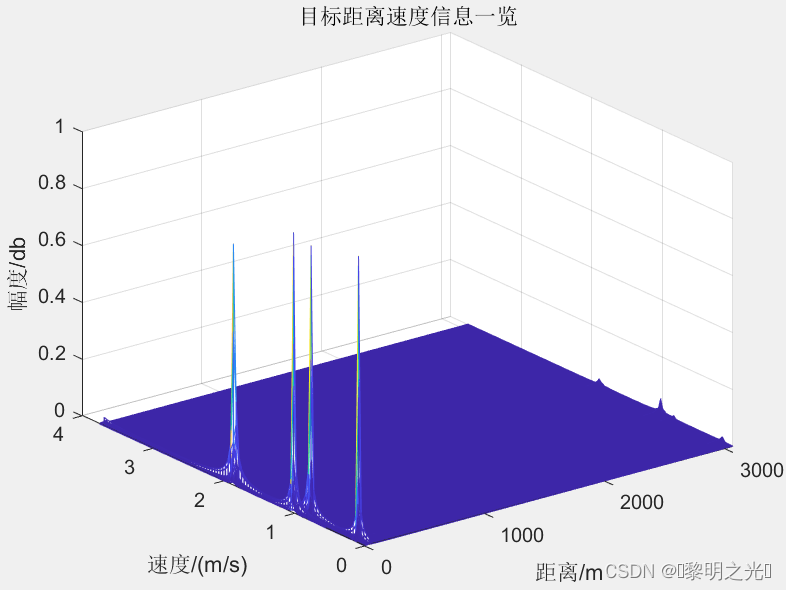 |
在仿真中,我们假设在50m范围内存在4个目标物体,他们的距离和速度从图中易知。
- 实际结果
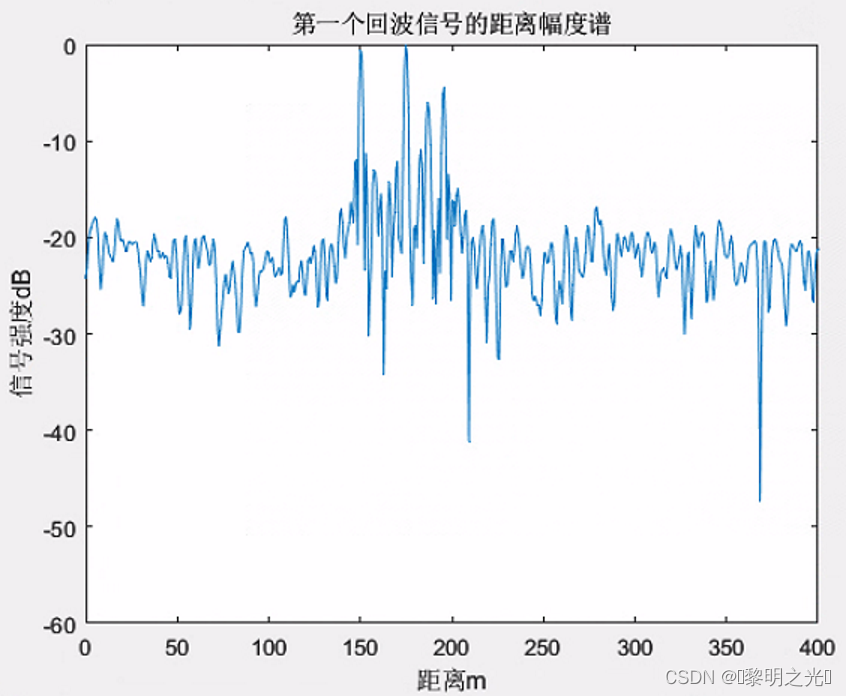
图中两个幅度接近0dB的脉冲可知,第一个尖峰属于约150米外的角反反射回来的回波,第二个回波与第一个角反回波相距约25米可能是后面约1.5米高的墙体反射回来的回波,再后面的两个幅度为-8dB左右的尖峰可能是更远处红色楼房的墙体反射回来的回波信号,但是,显而易见这些不同目标物体都能够被LFM雷达很好的探测。