ROS开发之如何使用ICM20948 IMU模块?
文章目录
- 0.引言
- 1.创建工作空间
- 2.获取IMU功能包并编译
- 3.检查IMU端口
- 4.启动launch显示IMU测量结果
0.引言
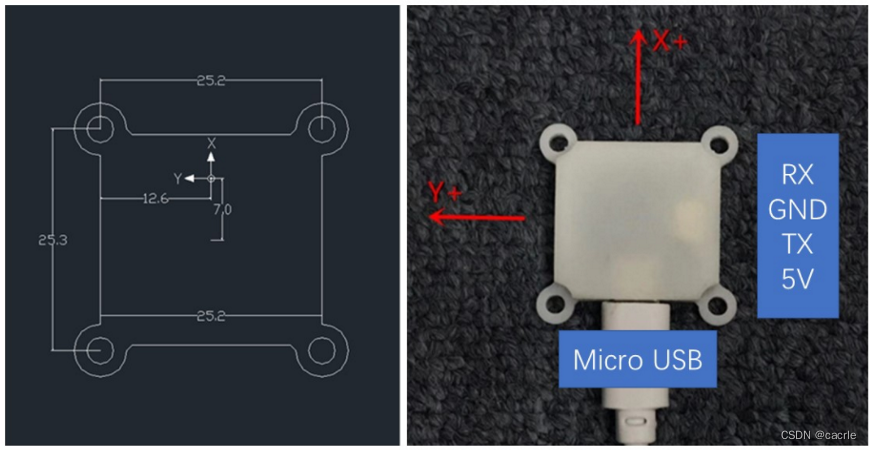
笔者研究课题涉及多传感器融合,除了前期对ROS工具的学习,还需要用IMU获取数据,对其他传感器的姿态纠正。本文使用IMU模块获取姿态数据。IMU(英文Inertial measurement unit,简称 IMU),是测量物体三轴姿态角及加速度的装置。一般IMU包括三轴陀螺仪及三轴加速度计,某些9轴IMU还包括三轴磁力计。
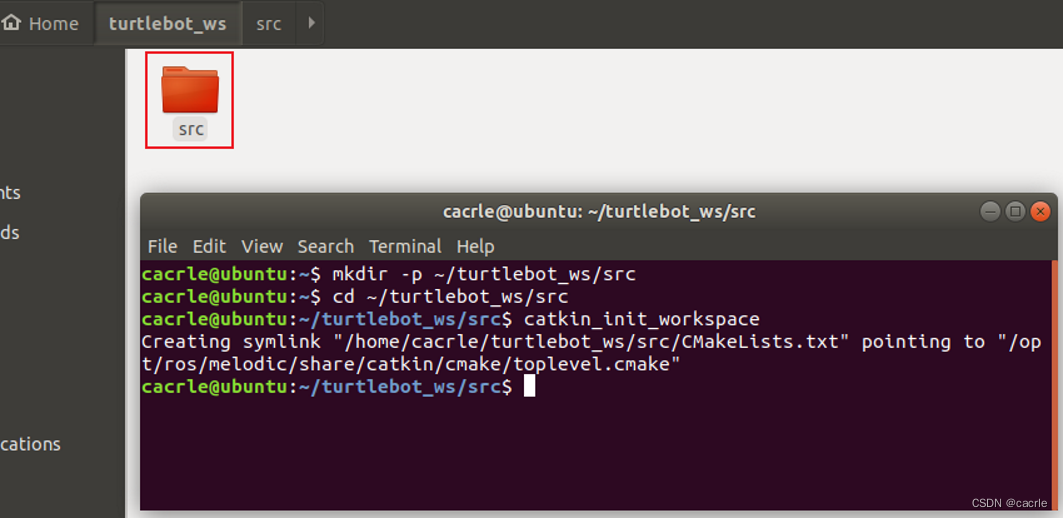
1.创建工作空间
mkdir -p ~/turtlebot_ws/src
cd ~/turtlebot_ws/src
catkin_init_workspace
2.获取IMU功能包并编译
IMU功能包由卖家提供,将IMU功能包复制到工作空间下。
cd ~/turtlebot_ws
catkin_make
或
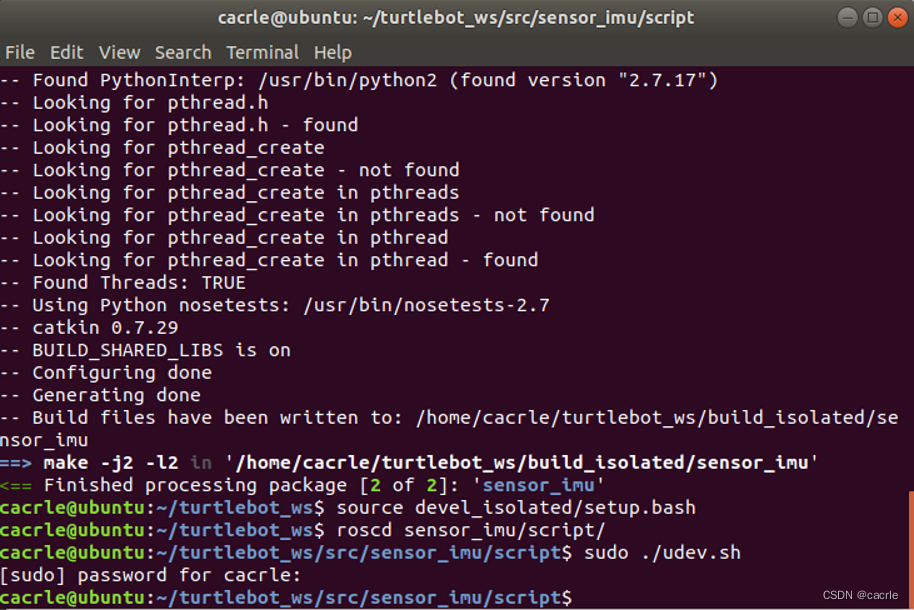
catkin_make_isolated
source devel/setup.bash
或
source devel_isolated/setup.bash
roscd sensor_imu/script/
sudo ./udev.sh
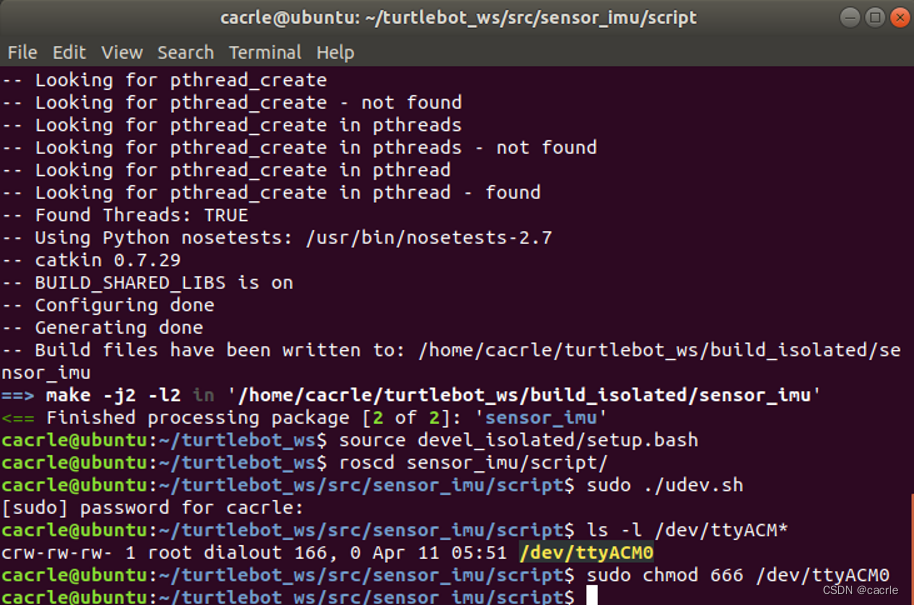
3.检查IMU端口
ls -l /dev/ttyACM*
sudo chmod 666 /dev/ttyACM0
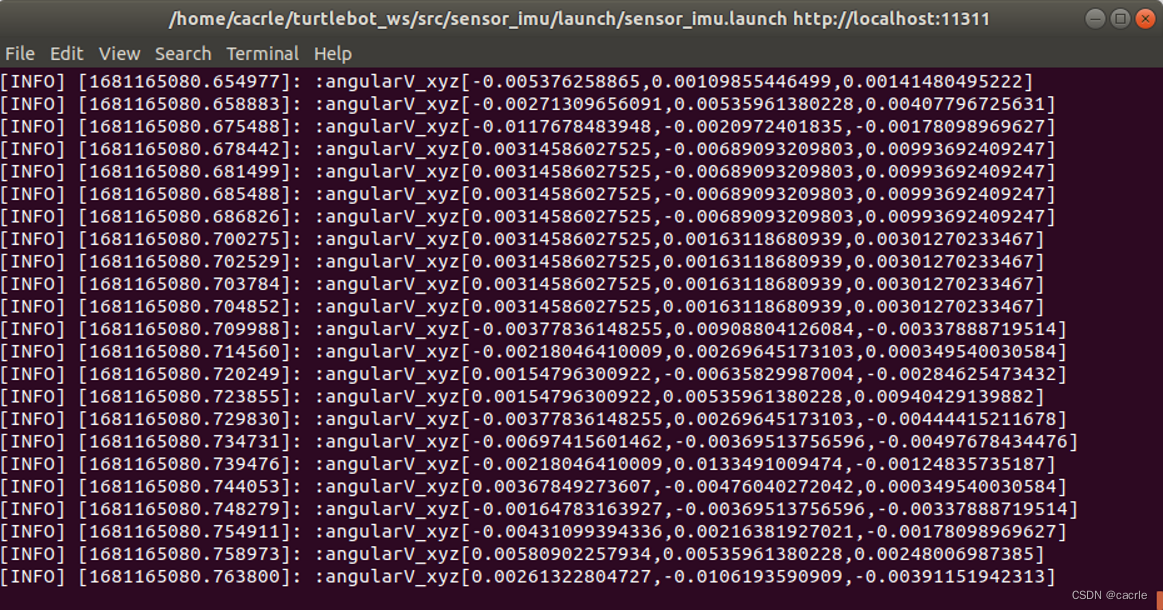
4.启动launch显示IMU测量结果
roslaunch sensor_imu sensor_imu.launch
参考资料:
[1] 木独. IMU简介; 2019-02-19 [accessed 2023-04-11].
[2] Will_Ye. ROS读IMU数据; 2021-05-04 [accessed 2023-04-11].
[3] shawfy-. ros接入IMU数据,打包发布topic; 2018-12-17 [accessed 2023-04-11].