Matlab simulink上手控制仿真学习笔记3-常用模块S Function及使用案例

讲得真的十分细致!个人感觉看完前4节就差不多了。
今天记录的是S Function。
内容比较多,加个目录:
- S Function
- 前置工作
- 1.1 parameter.m
- 1.2 plant.m
- function [sys,x0,str,ts,simStateCompliance] = plant(t,x,u,flag,pa)
- function [sys,x0,str,ts]=mdlInitializeSizes
- function sys=mdlDerivatives(t,x,u,pa)
- function sys=mdlOutputs(t,x,u)
- 1.3 ctrl.m
- function [sys,x0,str,ts,simStateCompliance] = ctrl(t,x,u,flag,pa)
- function [sys,x0,str,ts]=mdlInitializeSizes
- function sys=mdlOutputs(t,x,u)
- 1.4 signal.m
- function [sys,x0,str,ts,simStateCompliance] = plant(t,x,u,flag,pa)
- function [sys,x0,str,ts]=mdlInitializeSizes
- function sys=mdlOutputs(t,x,u)
- 1.5 simulink系统搭建
- 1.6 demo_plot.m
S Function
可以用Matlab Function轻松搭建方程,(长得下面这样子),具体看视频的
第3节:S-Function/S函数,一个实例带你直接上手(非线性反步法搭建)
第4节:S-Function/S函数补充,滑模控制器完整搭建
演示的是这个方程
前置工作
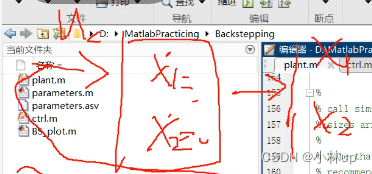
在工作目录下创建四个函数:
plant.m 描述物理方程
ctrl.m 描述控制律
parameter.m 描述常数
demo_plot.m 绘制图形
下面我们依次讲怎么写这些函数。
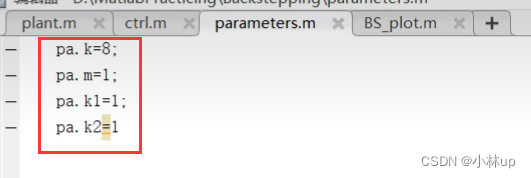
1.1 parameter.m
写入我们要的参数。
pa.k=8;
pa.m=1;
pa.k1=1;
pa.k2=1;
pa.A=5;%生成信号使用
pa.T=20;%生成信号使用
填写好以后运行一下,让pa在工作区中可以被调用。
1.2 plant.m
对应公式:
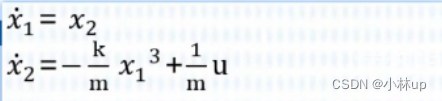
输入u,输出
x
1
x_1
x1和
x
2
x_2
x2.
没有直接馈入。
在命令行输入edit sfuntmpl
调出S function的模板:
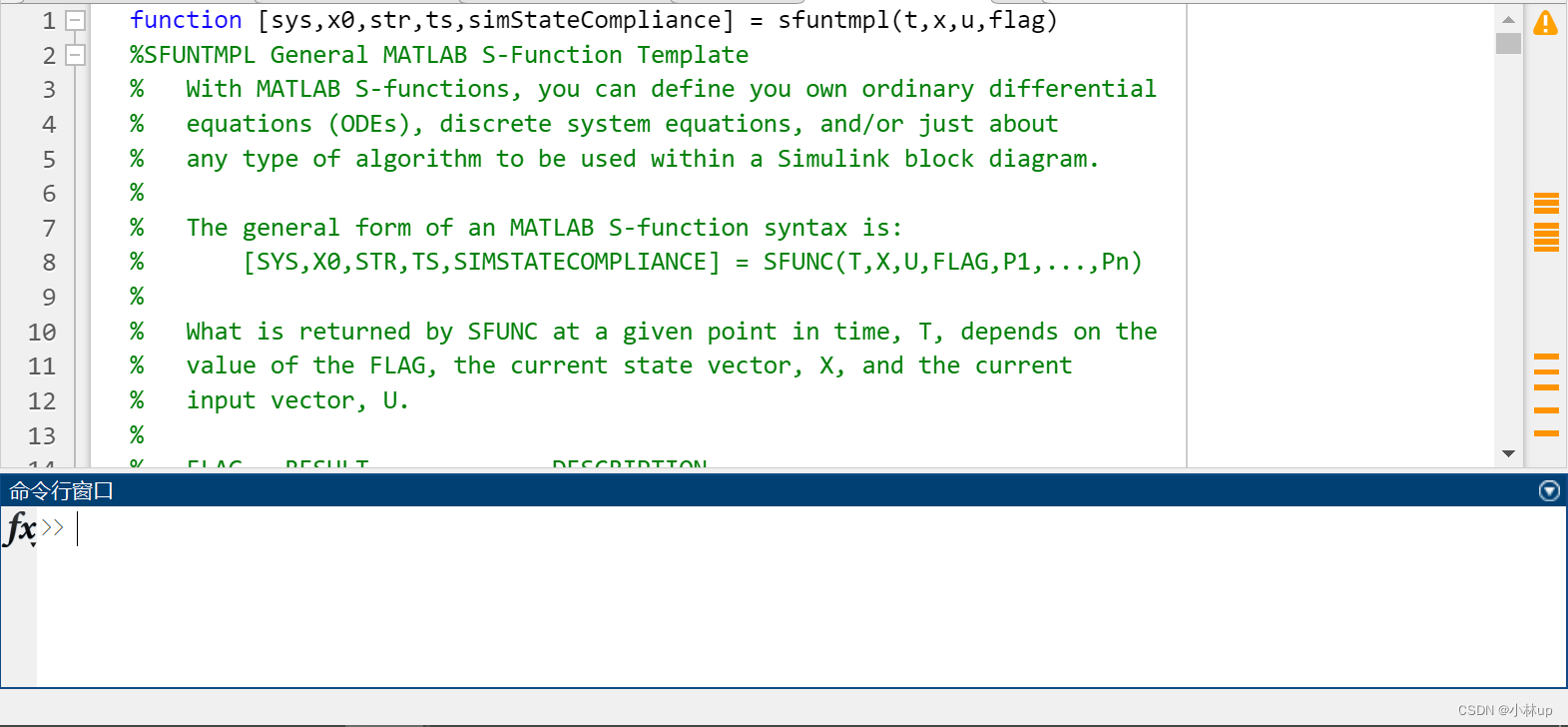
把模板里的内容复制到plant.m中,然后把sfuntmpl改成plant。注意我们调用parameter.m里的pa结构体参数,我们需要注意在用到pa的地方都加上pa。

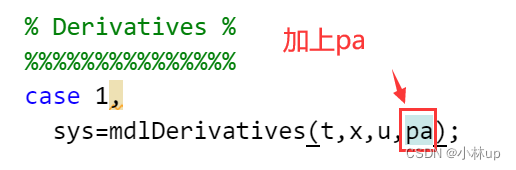
function [sys,x0,str,ts,simStateCompliance] = plant(t,x,u,flag,pa)
function [sys,x0,str,ts,simStateCompliance] = plant(t,x,u,flag,pa)
switch flag,
%%%%%%%%%%%%%%%%%%
% Initialization %
%%%%%%%%%%%%%%%%%%
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
%%%%%%%%%%%%%%%
% Derivatives %
%%%%%%%%%%%%%%%
case 1,
sys=mdlDerivatives(t,x,u,pa);
%%%%%%%%%%
% Update %
%%%%%%%%%%
case 2,
sys=mdlUpdate(t,x,u);%连续系统不用管
%%%%%%%%%%%
% Outputs %
%%%%%%%%%%%
case 3,
sys=mdlOutputs(t,x,u);
%%%%%%%%%%%%%%%%%%%%%%%
% GetTimeOfNextVarHit %
%%%%%%%%%%%%%%%%%%%%%%%
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
%%%%%%%%%%%%%
% Terminate %
%%%%%%%%%%%%%
case 9,
sys=mdlTerminate(t,x,u);
%%%%%%%%%%%%%%%%%%%%
% Unexpected flags %
%%%%%%%%%%%%%%%%%%%%
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts]=mdlInitializeSizes
设置初始化。
如图输入不是直通的,
x
1
x_1
x1和
x
2
x_2
x2的表达式并没有
u
u
u。
x
2
x_2
x2的导数和
u
u
u有关系,但是
x
2
x_2
x2并没有直接和
u
u
u直接产生关系。
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 2;%连续状态个数为2:x_1和x_2,因为采用连续采样周期仿真
sizes.NumDiscStates = 0;%离散状态个数为0
sizes.NumOutputs = 2;%输出量为2个:x_1和x_2
sizes.NumInputs = 1;%输入量为1个,u
sizes.DirFeedthrough = 0;%方程中输入没有直馈于输出
sizes.NumSampleTimes = 1;%采样周期数是1,默认就不动
sys = simsizes(sizes);
x0=[0,0]:%初始化输出值x_1和x_2都是0
str=[]:%无其他说明
ts=[0 0]:%连续采样,第一个值为0(每隔0秒采样一次),没有偏移,第二个值也设为0
function sys=mdlDerivatives(t,x,u,pa)
设置微分方程。
输出是左边的导数项,输入是
x
1
x_1
x1和
x
2
x_2
x2、
u
u
u,然后
k
k
k、
m
m
m是常数从parameter结构体中获取。函数的输入项注意要加上pa。

function sys=mdlDerivatives(t,x,u,pa)
k=pa.k;
m=pa.m;
x1=x(1);
x2=x(2);
dx1=x(2);
dx2=-k/m*x1^3+1/m*u;
sys = [dx1;dx2];
function sys=mdlOutputs(t,x,u)
设置输出,我们输出的是x。
function sys=mdlOutputs(t,x,u)
sys = x;
1.3 ctrl.m
设置控制律。
在命令行输入edit sfuntmpl
调出S function的模板:
把模板里的内容复制到ctrl.m中,然后把sfuntmpl改成ctrl。注意我们调用parameter.m里的pa结构体参数,我们需要注意在用到pa的地方都加上pa。

function [sys,x0,str,ts,simStateCompliance] = ctrl(t,x,u,flag,pa)
function [sys,x0,str,ts,simStateCompliance] = ctrl(t,x,u,flag,pa)
switch flag,
%%%%%%%%%%%%%%%%%%
% Initialization %
%%%%%%%%%%%%%%%%%%
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
%%%%%%%%%%%%%%%
% Derivatives %
%%%%%%%%%%%%%%%
case 1,
sys=mdlDerivatives(t,x,u);
%%%%%%%%%%
% Update %
%%%%%%%%%%
case 2,
sys=mdlUpdate(t,x,u);%连续系统不用管
%%%%%%%%%%%
% Outputs %
%%%%%%%%%%%
case 3,
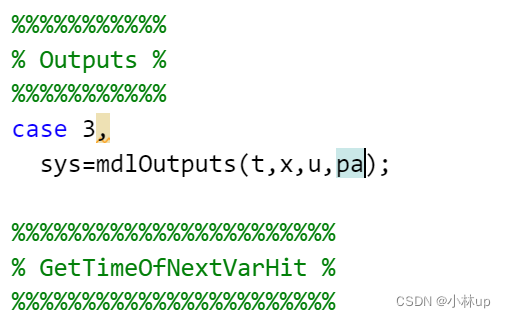
sys=mdlOutputs(t,x,u,pa);
%%%%%%%%%%%%%%%%%%%%%%%
% GetTimeOfNextVarHit %
%%%%%%%%%%%%%%%%%%%%%%%
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
%%%%%%%%%%%%%
% Terminate %
%%%%%%%%%%%%%
case 9,
sys=mdlTerminate(t,x,u);
%%%%%%%%%%%%%%%%%%%%
% Unexpected flags %
%%%%%%%%%%%%%%%%%%%%
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts]=mdlInitializeSizes
设置初始化。
对应公式:
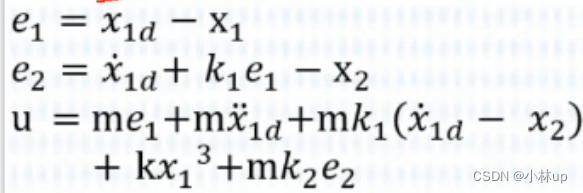
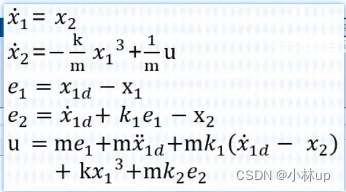
输入 x 1 d x_{1d} x1d、 x ˙ 1 d \dot{x}_{1d} x˙1d、 x ¨ 1 d \ddot{x}_{1d} x¨1d、 x 1 x_1 x1和 x 2 x_2 x2,共5个.输出 u u u,共1个。
是直接馈入。如图输入是直通的,
u
u
u的输出直接和五个输入参数有关。
注意没有状态变量,连续状态和离散状态都是0。
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;%连续状态个数为0,没有状态
sizes.NumDiscStates = 0;%离散状态个数为0,没有状态
sizes.NumOutputs = 1;%输出量为1个:u
sizes.NumInputs = 5;%输入量为5个,$x_{1d}$、$\dot{x}_{1d}$、$\ddot{x}_{1d}$、$x_1$和$x_2$
sizes.DirFeedthrough = 1;%方程中输入有直馈于输出
sizes.NumSampleTimes = 1;%采样周期数是1,默认就不动
sys = simsizes(sizes);
x0=[]:%没有状态变量
str=[]:%无其他说明
ts=[0 0]:%连续采样,第一个值为0(每隔0秒采样一次),没有偏移,第二个值也设为0
function sys=mdlOutputs(t,x,u)
设置输出,用到了parameter的参数所以要在输入参数中添加pa,和前面是一样的。
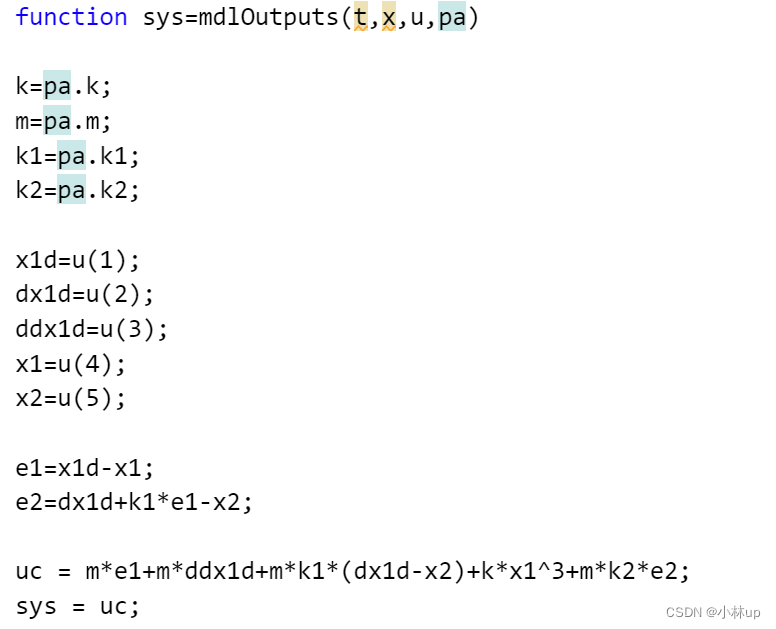
function sys=mdlOutputs(t,x,u,pa)
k=pa.k;
m=pa.m;
k1=pa.k1;
k2=pa.k2;
x1d=u(1);
dx1d=u(2);
ddx1d=u(3);
x1=u(4);
x2=u(5);
e1=x1d-x1;
e2=dx1d+k1*e1-x2;
uc = m*e1+m*ddx1d+m*k1*(dx1d-x2)+k*x1^3+m*k2*e2;
sys = uc;
1.4 signal.m
function [sys,x0,str,ts,simStateCompliance] = plant(t,x,u,flag,pa)
用到了parameter参数中的pa,注意加上。

function [sys,x0,str,ts,simStateCompliance] = sfuntmpl(t,x,u,flag,pa)
switch flag,
%%%%%%%%%%%%%%%%%%
% Initialization %
%%%%%%%%%%%%%%%%%%
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
%%%%%%%%%%%%%%%
% Derivatives %
%%%%%%%%%%%%%%%
case 1,
sys=mdlDerivatives(t,x,u);
%%%%%%%%%%
% Update %
%%%%%%%%%%
case 2,
sys=mdlUpdate(t,x,u);
%%%%%%%%%%%
% Outputs %
%%%%%%%%%%%
case 3,
sys=mdlOutputs(t,x,u,pa);
%%%%%%%%%%%%%%%%%%%%%%%
% GetTimeOfNextVarHit %
%%%%%%%%%%%%%%%%%%%%%%%
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
%%%%%%%%%%%%%
% Terminate %
%%%%%%%%%%%%%
case 9,
sys=mdlTerminate(t,x,u);
%%%%%%%%%%%%%%%%%%%%
% Unexpected flags %
%%%%%%%%%%%%%%%%%%%%
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts]=mdlInitializeSizes
信号我们给的是一个正弦信号:
x
1
d
=
A
sin
(
2
π
T
t
)
x
˙
1
d
=
A
2
π
T
cos
(
2
π
T
t
)
x
¨
1
d
=
−
A
(
2
π
T
)
2
sin
(
2
π
T
t
)
\begin{aligned}x_{1d}&=A\sin\left(\frac{2\pi}{T}t\right)\\ \dot{x}_{1d}&=A\frac{2\pi}{T}\cos\left(\frac{2\pi}{T}t\right)\\ \ddot{x}_{1d}&=-A\left(\frac{2\pi}{T}\right)^2\sin\left(\frac{2\pi}{T}t\right)\end{aligned}
x1dx˙1dx¨1d=Asin(T2πt)=AT2πcos(T2πt)=−A(T2π)2sin(T2πt)
三个输出,零个输入,没有反馈直通,无状态变量。信号的导数建议不要使用simulink自带的微分模块,容易出现突变导致仿真的失真。
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 3;%三个输出
sizes.NumInputs = 0;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
function sys=mdlOutputs(t,x,u)
设置输出,用到了parameter的参数所以要在输入参数中添加pa,和前面是一样的。
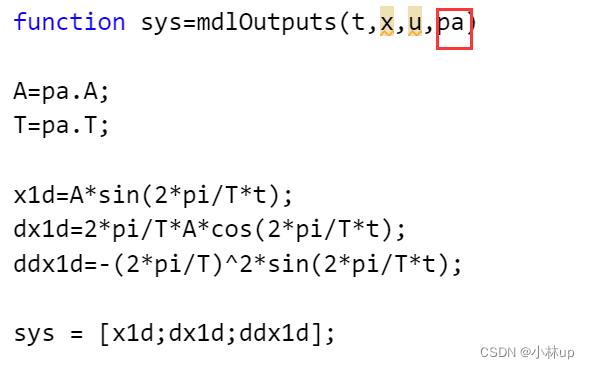
function sys=mdlOutputs(t,x,u,pa)
A=pa.A;
T=pa.T;
x1d=A*sin(2*pi/T*t);
dx1d=2*pi/T*A*cos(2*pi/T*t);
ddx1d=-(2*pi/T)^2*sin(2*pi/T*t);
sys = [x1d;dx1d;ddx1d];
1.5 simulink系统搭建
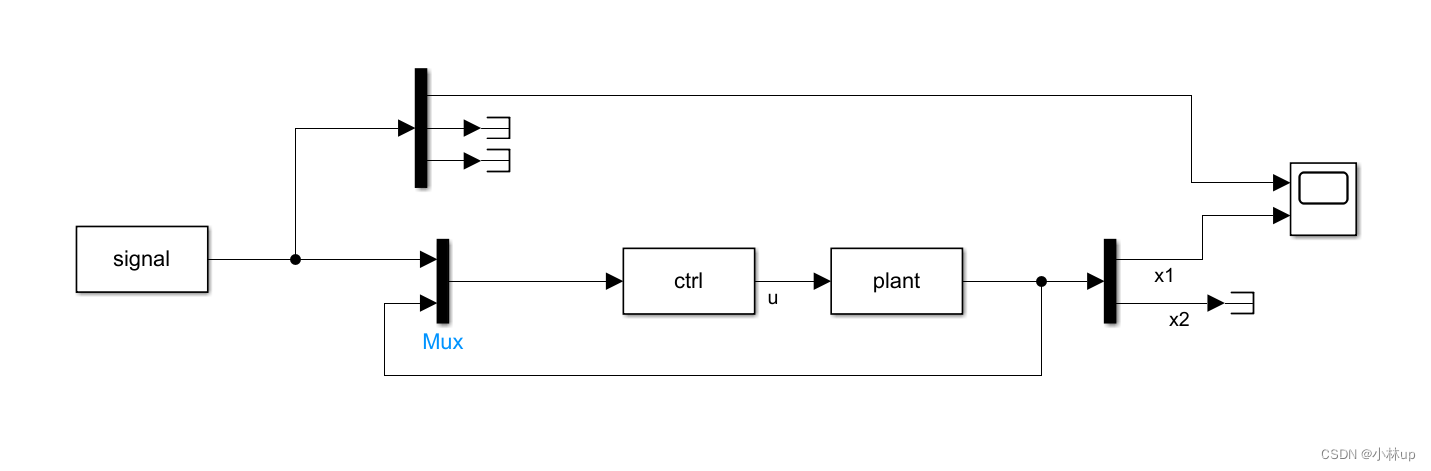
打开simulink,双击鼠标输入S function。
选择后然后双击。把Function名称改作我们刚刚设置的函数(下面是ctrl的设置)。注意参数加上pa(外部参数),如果有多个参数就用逗号隔开。外部参数就是上面说的除了模板里原有参数其他的参数。
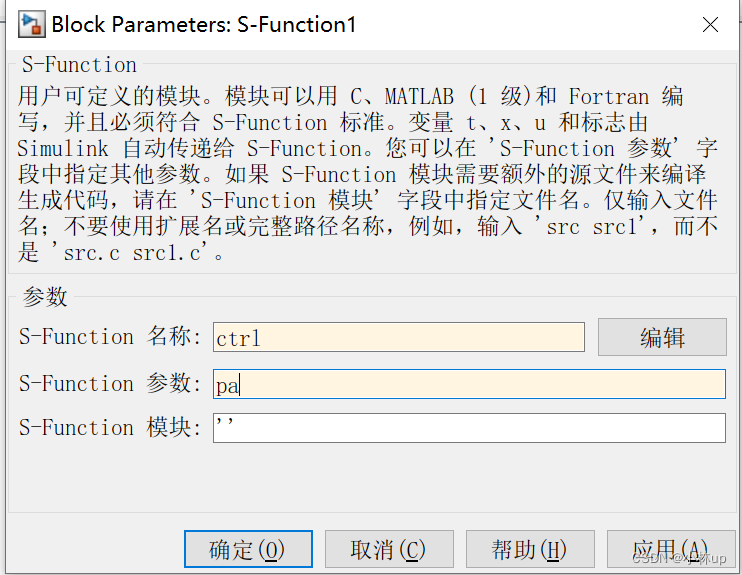

变成这样
最后连线成这样。我保存为demo_sim.slx,其他名字也可以。
我们设置一下求解器

设置仿真为定步长,步长是0.001.定步长速度比变步长慢,但是精度更高,曲线更加平滑。
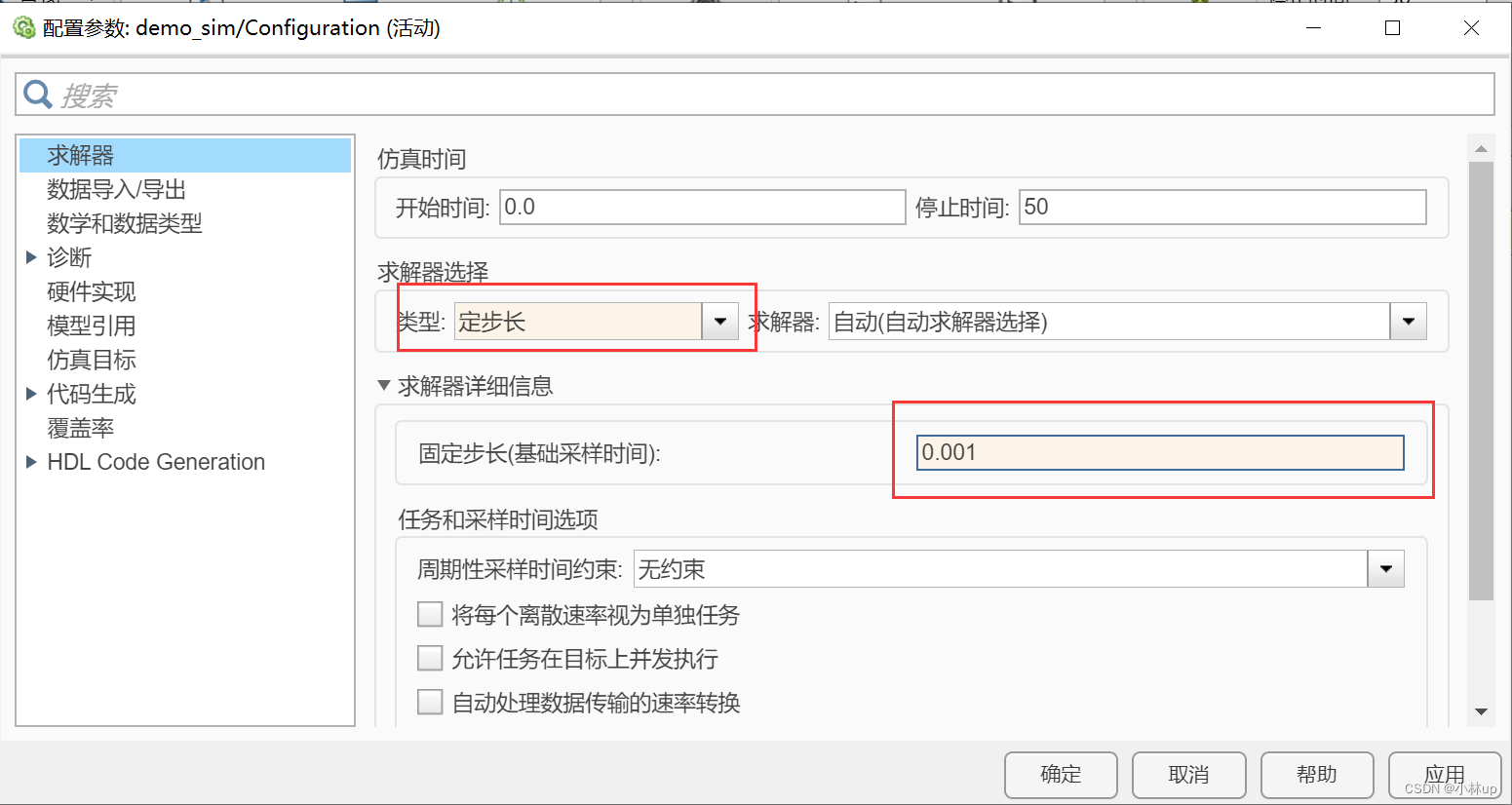
仿真时间设置为50s。

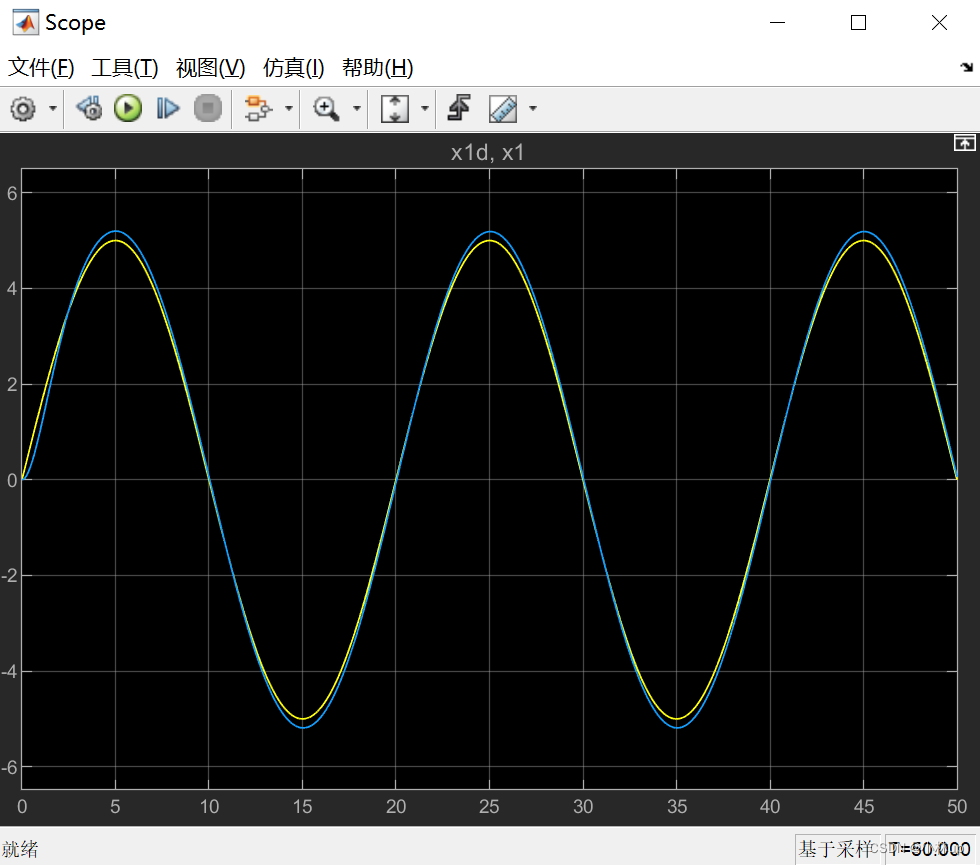
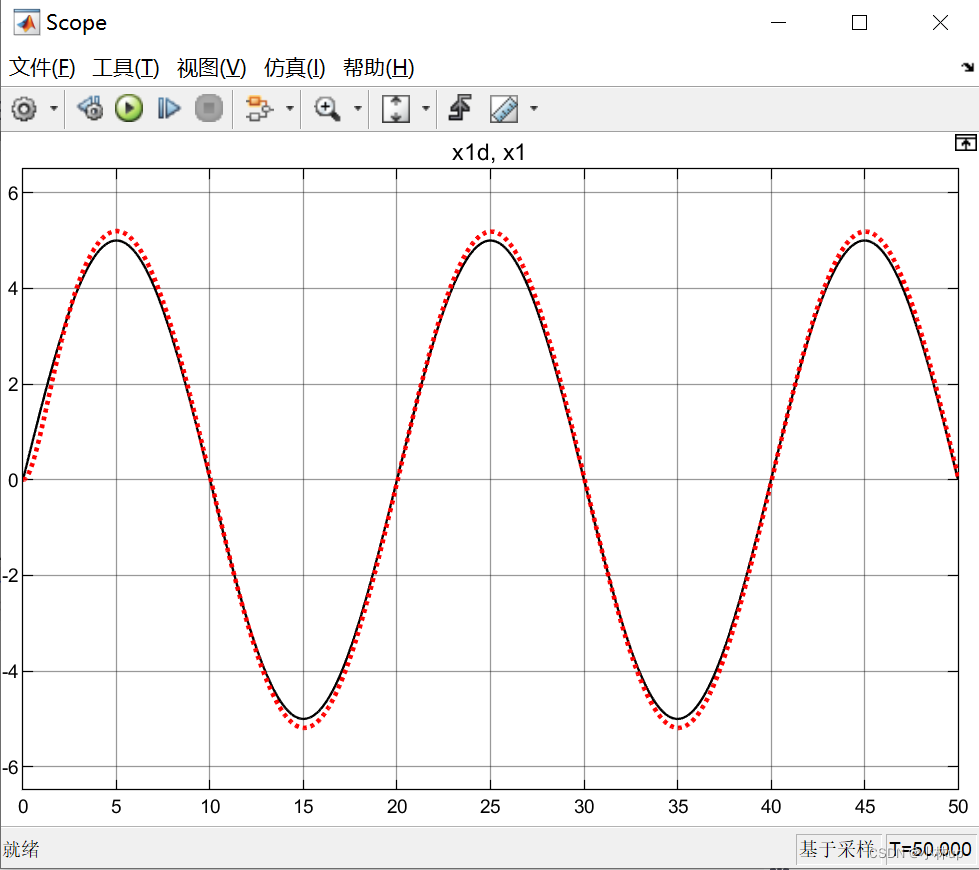
运行:

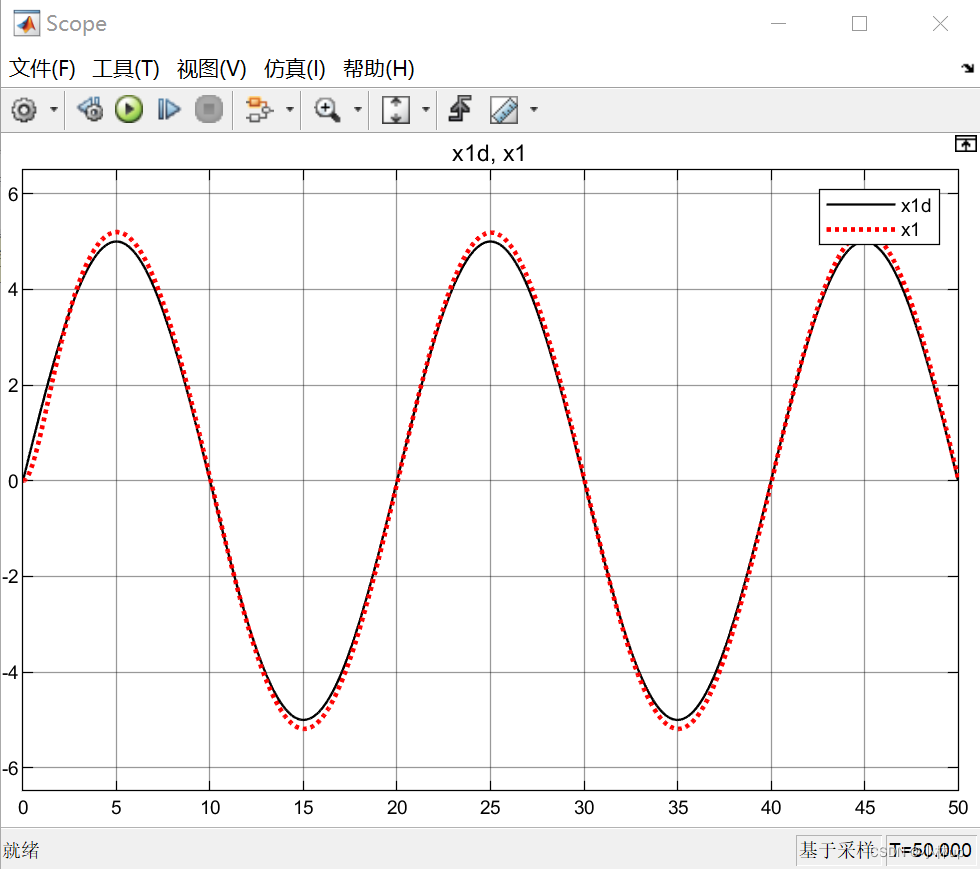
在scope我们看到仿真结果,可以看到较好地进行了跟踪。
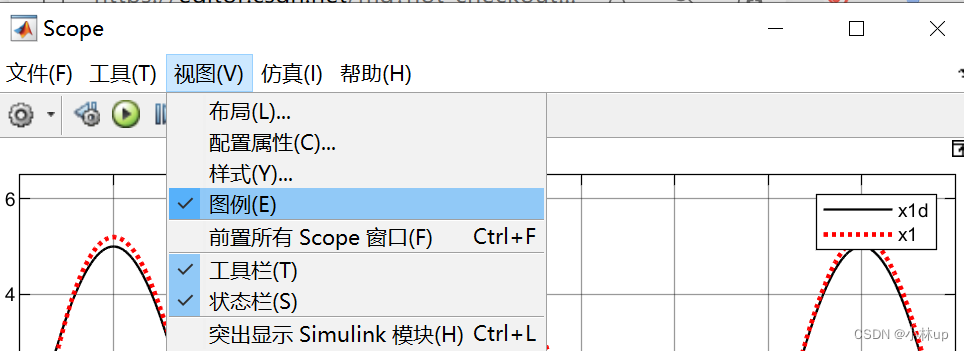
选择视图->样式。
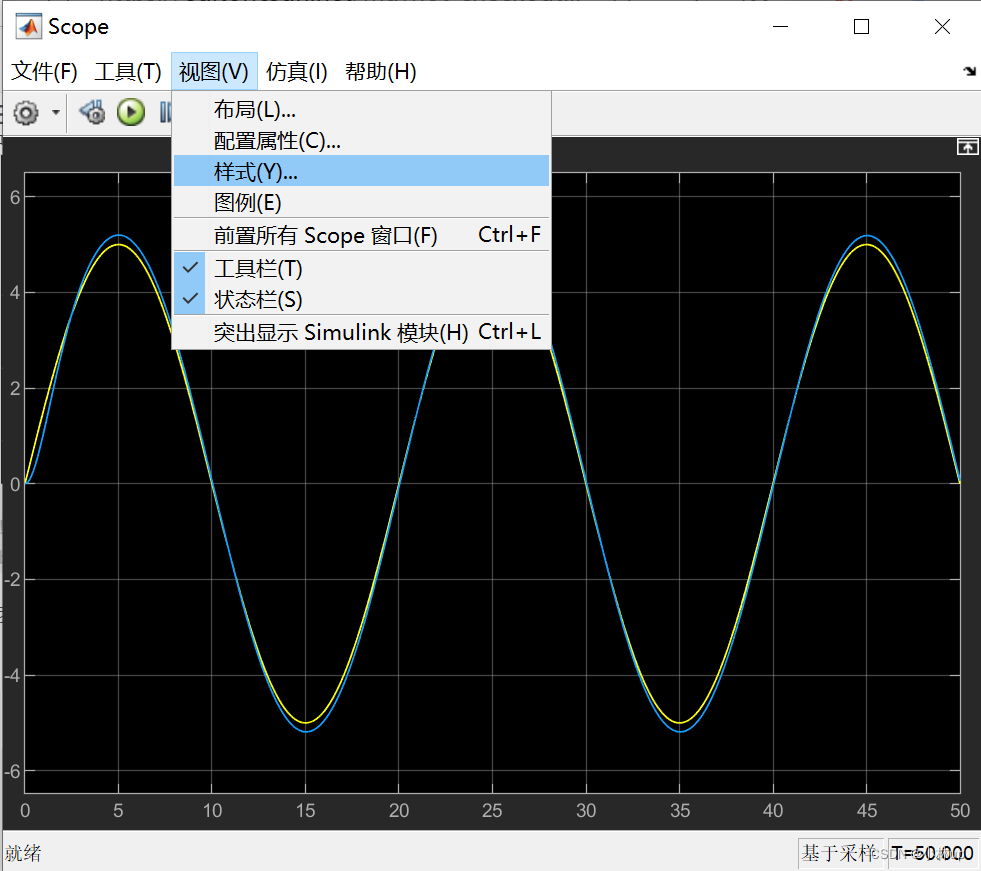
我们可以打开样式调整一下画面线型、线宽、画布颜色等。我设置了图窗、坐标区、各个线条属性。

还可以添加图例。
如果想把simulink的数据导出到matlab的工作区。需要添加 to workspace模块。
我们双击修改一下名字叫x.并以数组的形式输出。

我们看到前面有一个out.,默认是以结构体的形式输出到工作区的。我们可以再模型设置里设置不要以结构体输出:

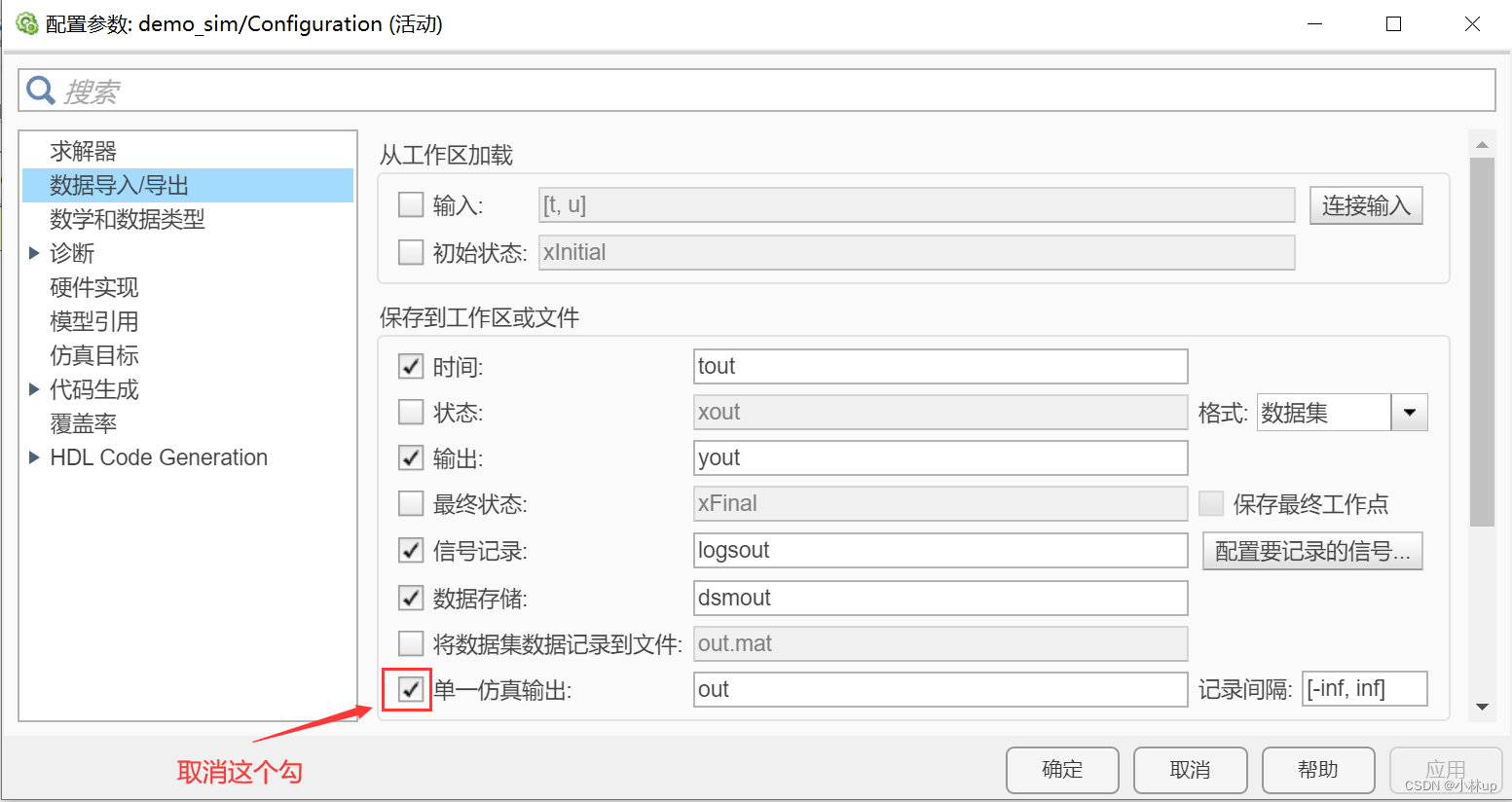
就没有前面的out了。连接一下。
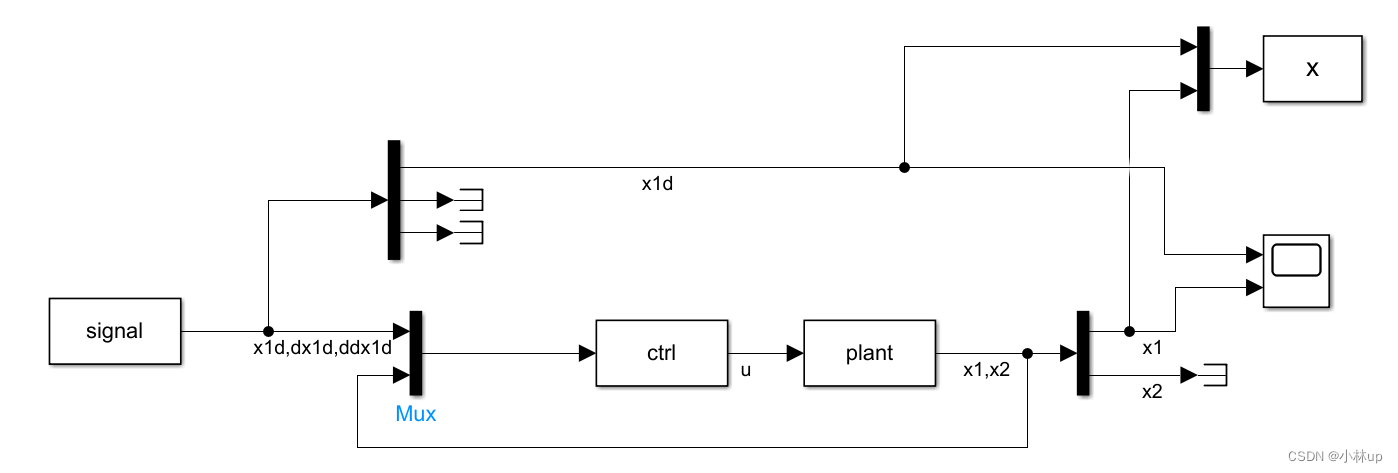
工作区就出现了时间tout和我们要的x。
我们双击看一下x。
第一列是x1d,第二列是x1。
现在工作区有了数据,我们可以自定义画图了!
1.6 demo_plot.m
新建一个画图的m文件demo_plot.m。
figure;
plot(tout,x(:,1),'k',...
tout,x(:,2),'r:','LineWidth',2);
legend('x1d','x1');
title('Position Tracking');
xlabel('t/s');
ylabel('Position/mm')
就可以自定义自己想要的图了!

上述文件可以在我的资源Matlab Simulink S函数使用实例(有讲解)中找到。
其他参考资料
- Matlab S-function 使用总结
- S-function入门及案例详解(1)——S-function基础介绍及基本案例
- S-function入门及案例详解(2)——S-function基本案例介绍
- S-function入门及案例详解(3)——S-function进阶案例
- S-function入门及案例详解(4)——S-function进阶案例之连续/离散状态空间表达式的S-function实现