【23-24 秋学期】NNDL 作业11 LSTM
习题6-4 推导LSTM网络中参数的梯度, 并分析其避免梯度消失的效果
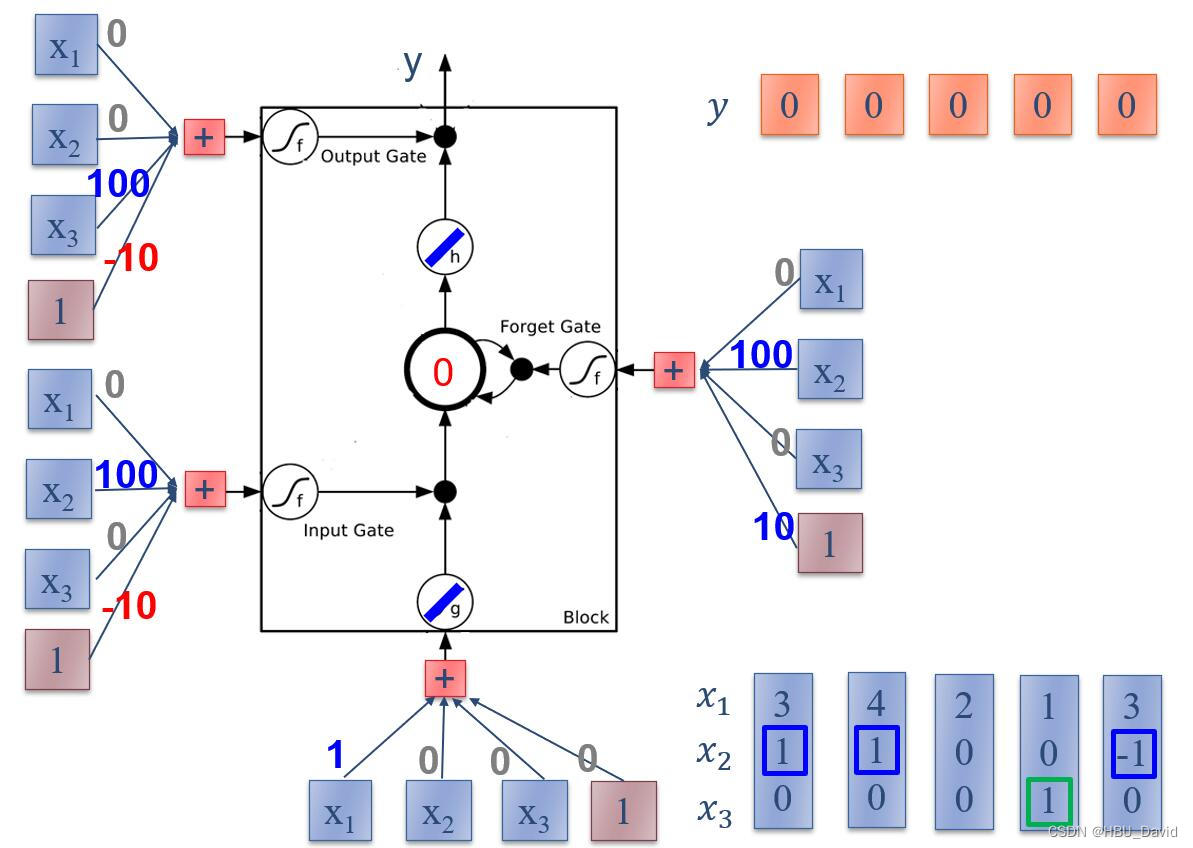
习题6-3P 编程实现下图LSTM运行过程

李宏毅机器学习笔记:RNN循环神经网络_李宏毅rnn笔记_ZEERO~的博客-CSDN博客![]() https://blog.csdn.net/weixin_43249038/article/details/132650998
https://blog.csdn.net/weixin_43249038/article/details/132650998
L5W1作业1 手把手实现循环神经网络-CSDN博客![]() https://blog.csdn.net/segegse/article/details/127708468
https://blog.csdn.net/segegse/article/details/127708468