机器人纯阻抗控制接触刚性环境
问题描述
在机器人学中,阻抗控制是一种常用的控制策略,用于管理机器人在与环境交互时的运动和力。阻抗控制背后的关键概念是将环境视为导纳,而将机器人视为阻抗。
纯阻抗控制接触刚性环境时,机器人的行为方式主要受其阻抗参数的影响。这些参数包括质量(Md)、阻尼(Bd)和刚度(Kd)。
- 质量(Md):影响机器人对环境产生冲击运动的大小。Md较大时,会对环境产生较大的冲击,可能导致轨迹误差较大和系统响应较慢。
- 阻尼(Bd):相当于摩擦,可以减少响应力的超调,但也会使响应变慢并增加能量消耗。
- 刚度(Kd):其作用类似于弹簧。离中心位置越远,受到的弹力越大。Kd越小,即弹簧刚度系数越小,力控制稳态误差越小,系统响应越慢。
在接触刚性环境时,阻抗控制需要适当调整这些参数以达到期望的性能。通常,如果环境刚度大,那么阻抗刚度应该小一些;环境刚度小,则阻抗刚度可以大一些,这样机器人就能表现出很好的顺应性。
此外,还有两种主要的阻抗控制方法:基于位置的阻抗控制和基于力的阻抗控制。基于位置的阻抗控制实际上也就是导纳控制,而基于力的阻抗控制则是狭义上的阻抗控制。这两种控制方法的主要区别在于它们是如何定义和控制机器人的运动和力的。
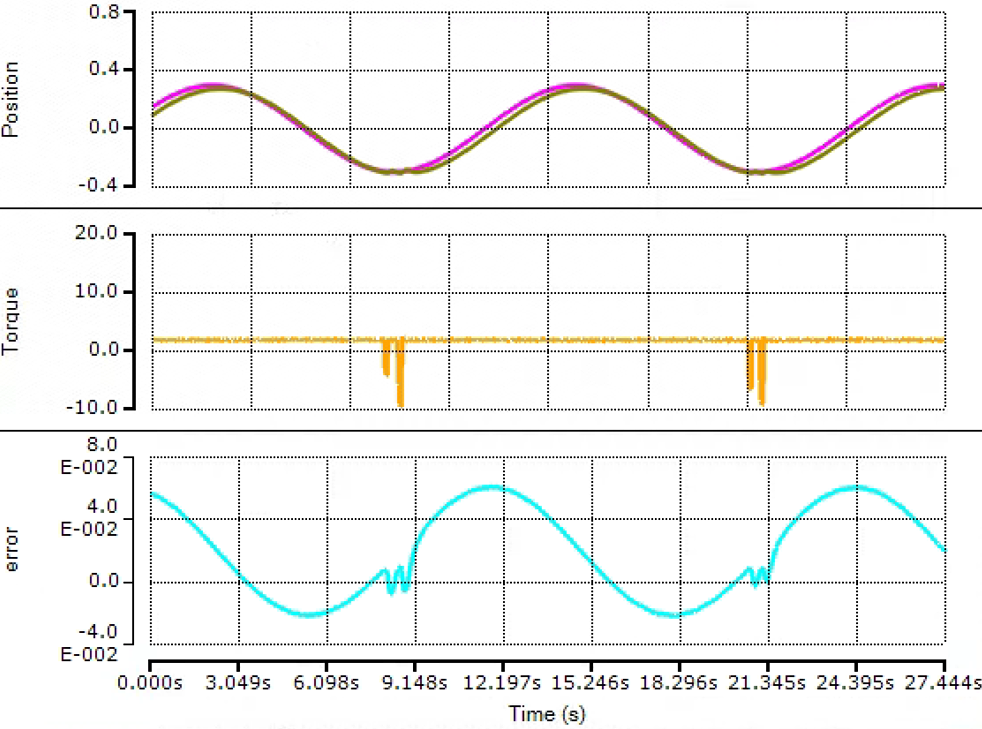
Kd=10,Bd=1



Kd=100,Bd=1