HCIA-HarmonyOS设备开发认证V2.0-3.2.轻量系统内核基础-任务管理

目录
- 一、任务管理
- 1.1、任务状态
- 1.2、任务基本概念
- 1.3、任务管理使用说明
- 1.4、任务开发流程
- 1.5、任务管理接口
一、任务管理
从系统角度看,任务是竞争系统资源的最小运行单元。任务可以使用或等待CPU、使用内存空间等系统资源,并独立于其它任务运行。
OpenHarmony LiteOS-M 的任务模块可以给用户提供多个任务,实现任务间的切换,帮助用户管理业务程序流程。任务模块具有如下特性:
- 支持多任务。
- 一个任务表示一个线程。
- 抢占式调度机制,高优先级的任务可打断低优先级任务,低优先级任务必须在高优先级任务阻塞或结束后才能得到调度。
- 相同优先级任务支持时间片轮转调度方式。
- LiteOS-M共有32个优先级[0-31],最高优先级为0,最低优先级为31。
1.1、任务状态
任务有多种运行状态。系统初始化完成后,创建的任务就可以在系统中竞争一定的资源,由内核进行调度。
任务状态通常分为以下四种:
- 就绪(Ready):该任务在就绪队列中,只等待CPU。
- 运行(Running):该任务正在执行。
- 阻塞(Blocked):该任务不在就绪队列中。包含任务被挂起(suspend状态)、任务被延时(delay状态)、任务正在等待信号量、读写队列或者等待事件等。
- 退出态(Dead):该任务运行结束,等待系统回收资源。
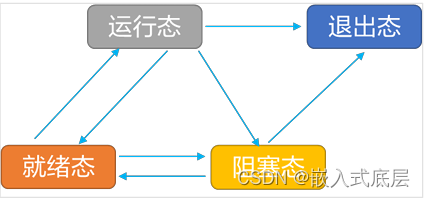
任务状态迁移说明:
- 就绪态→运行态:任务创建后进入就绪态,发生任务切换时,就绪队列中最高优先级的任务被执行,从而进入运行态,同时该任务从就绪队列中移出。
- 运行态→阻塞态:正在运行的任务发生阻塞(挂起、延时、读信号量等)时,将该任务插入到对应的阻塞队列中,任务状态由运行态变成阻塞态,然后发生任务切换,运行就绪队列中最高优先级任务。
- 阻塞态→就绪态(阻塞态→运行态):阻塞的任务被恢复后(任务恢复、延时时间超时、读信号量超时或读到信号量等),此时被恢复的任务会被加入就绪队列,从而由阻塞态变成就绪态;此时如果被恢复任务的优先级高于正在运行任务的优先级,则会发生任务切换,该任务由就绪态变成运行态。
- 就绪态→阻塞态:任务也有可能在就绪态时被阻塞(挂起),此时任务状态由就绪态变为阻塞态,该任务从就绪队列中删除,不会参与任务调度,直到该任务被恢复。
- 运行态→就绪态:有更高优先级任务创建或者恢复后,会发生任务调度,此刻就绪队列中最高优先级任务变为运行态,那么原先运行的任务由运行态变为就绪态,依然在就绪队列中。
- 运行态→退出态:运行中的任务运行结束,任务状态由运行态变为退出态。退出态包含任务运行结束的正常退出状态以及Invalid状态。例如,任务运行结束但是没有自删除,对外呈现的就是Invalid状态,即退出态。
- 阻塞态→退出态:阻塞的任务调用删除接口,任务状态由阻塞态变为退出态。
1.2、任务基本概念
- 任务ID:任务ID,在任务创建时通过参数返回给用户,是任务的重要标识。系统中的ID号是唯一的。用户可以通过任务ID对指定任务进行任务挂起、任务恢复、查询任务名等操作。
- 任务优先级:优先级表示任务执行的优先顺序。任务的优先级决定了在发生任务切换时即将要执行的任务,就绪队列中最高优先级的任务将得到执行。
- 任务入口函数:新任务得到调度后将执行的函数。该函数由用户实现,在任务创建时,通过任务创建结构体设置。
- 任务栈:每个任务都拥有一个独立的栈空间,我们称为任务栈。栈空间里保存的信息包含局部变量、寄存器、函数参数、函数返回地址等。
- 任务上下文:任务在运行过程中使用的一些资源,如寄存器等,称为任务上下文。当这个任务挂起时,其他任务继续执行,可能会修改寄存器等资源中的值。如果任务切换时没有保存任务上下文,可能会导致任务恢复后出现未知错误。因此在任务切换时会将切出任务的任务上下文信息,保存在自身的任务栈中,以便任务恢复后,从栈空间中恢复挂起时的上下文信息,从而继续执行挂起时被打断的代码。
- 任务控制块TCB:每个任务都含有一个任务控制块(TCB)。TCB包含了任务上下文栈指针(stack pointer)、任务状态、任务优先级、任务ID、任务名、任务栈大小等信息。TCB 可以反映出每个任务运行情况。
- 任务切换:任务切换包含获取就绪队列中最高优先级任务、切出任务上下文保存、切入任务上下文恢复等动作。用户创建任务时,系统会初始化任务栈,预置上下文。此外,系统还会将“任务入口函数”地址放在相应位置。这样在任务第一次启动进入运行态时,将会执行“任务入口函数”。
1.3、任务管理使用说明
- 执行Idle任务时,会对待回收链表中的任务控制块和任务栈进行回收。
- 任务名是指针,并没有分配空间,在设置任务名时,禁止将局部变量的地址赋值给任务名指针。
- 任务栈的大小按8字节大小对齐。确定任务栈大小的原则是,够用就行,多了浪费,少了任务栈溢出。
- 挂起当前任务时,如果已经锁任务调度,则无法挂起。
- Idle任务及软件定时器任务不能被挂起或者删除。
- 在中断处理函数中或者在锁任务的情况下,执行LOS_TaskDelay会失败。
- 锁任务调度,并不关中断,因此任务仍可被中断打断。
- 锁任务调度必须和解锁任务调度配合使用。
- 设置任务优先级时可能会发生任务调度。
- 可配置的系统最大任务数是指:整个系统的任务总个数,而非用户能使用的任务个数。例如:系统软件定时器多占用一个任务资源,那么用户能使用的任务资源就会减少一个。
- LOS_CurTaskPriSet 和 LOS_TaskPriSet 接口不能在中断中使用,也不能用于修改软件定时器任务的优先级。
- LOS_TaskPriGet接口传入的task ID对应任务未创建或者超过最大任务数,统一返回-1。
- 在删除任务时要保证任务申请的资源(如互斥锁、信号量等)已被释放。
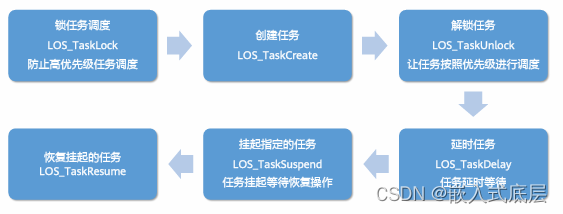
1.4、任务开发流程
-
- 锁任务调度LOS_TaskLock,防止高优先级任务调度;
-
- 创建任务LOS_TaskCreate;
-
- 解任务调度LOS_TaskUnlock,让任务按照优先级进行调度;
-
- 延时任务LOS_TaskDelay,任务延时等待;
-
- 挂起指定任务LOS_TaskSupend;
-
- 恢复挂起的任务LOS_TaskResume;
1.5、任务管理接口
| 功能类别 | 接口函数 | 描述 |
|---|---|---|
| los_task | LOS_TaskCreateOnly | 创建任务并挂起 |
| LOS_TaskCreate | 创建任务并就绪 | |
| LOS_TaskResume | 恢复挂起任务进入就绪 | |
| LOS_TaskSuspend | 挂起任务进入阻塞 | |
| LOS_TaskDelete | 删除任务 | |
| LOS_TaskDelay | 延时并挂起 | |
| LOS_TaskLock | 锁定任务调度 | |
| LOS_TaskUnlock | 恢复任务调度 | |
| LOS_TaskPriSet | 设置任务优先级 | |
| LOS_CurTaskPriSet | 设置当前任务优先级 | |
| LOS_TaskYield | 释放cpu并进入调度 | |
| LOS_TaskPriGet | 获取任务优先级 | |
| LOS_CurTaskIDGet | 获取当前任务ID | |
| LOS_NextTaskIDGet | 获取下一个任务ID | |
| LOS_CurTaskNameGet | 获取当前任务名称 | |
| LOS_TaskInfoGet | 获取任务信息 | |
| LOS_TaskStatusGet | 获取任务状态 | |
| LOS_TaskInfoMonitor | 获取任务所以信息 | |
| LOS_TaskSwitchInfoGet | 获取任务切换信息 | |
| LOS_TaskIsRunning | 获取任务调度状态 | |
| LOS_NewTaskIDGet | 获取下一个任务名称 | |
| LOS_TaskNameGet | 获取任务名称 | |
| LOS_TaskJoin | 挂起任务并等待回收资源 | |
| LOS_TaskDetach | 修改属性并自动回收资源 | |
| los_sched | LOS_SchedTickTimeoutNsGet | 获取任务调度时间片 |
| LOS_SchedTickHandler | Tick中断回调函数 | |
| LOS_Schedule | 触发任务调度 | |
| los_dispatch | HalStartToRun | 任务开始 |
| ArchIntLock | 关中断 | |
| ArchIntUnLock | 开中断 | |
| ArchTaskSchedule | 触发PendSV异常 | |
| HalPendSV | PendSV处理函数 | |
| HalTaskSwitch | 任务切换 | |
原文地址:https://blog.csdn.net/nawei87/article/details/136070747
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.kler.cn/a/231516.html 如若内容造成侵权/违法违规/事实不符,请联系邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.kler.cn/a/231516.html 如若内容造成侵权/违法违规/事实不符,请联系邮箱:809451989@qq.com进行投诉反馈,一经查实,立即删除!