行尾检测论文汇总
文章目录
- 2023
- GNSS-Free End-of-Row Detection and Headland Maneuvering for Orchard Navigation Using a Depth Camera
2023
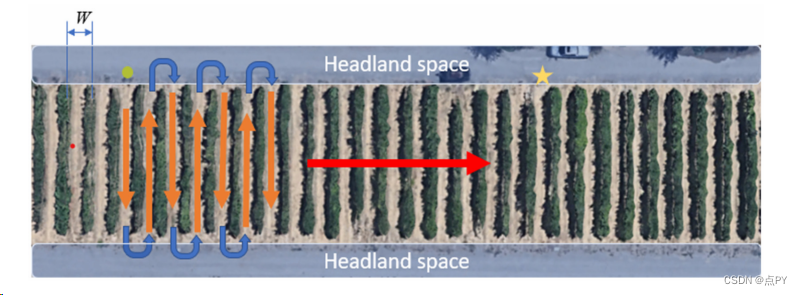
GNSS-Free End-of-Row Detection and Headland Maneuvering for Orchard Navigation Using a Depth Camera
摘要: 果园中基于GPS的导航可能是不稳定的,因为树木可能会阻塞GPS信号或引入多路径错误。关于没有GPS的机器人导航的研究大多集中在果园行内部的引导上;行端检测还没有得到足够的重视。此外,行之间的导航依赖于参考地图或人工地标。本文提出了一种新的行端检测方法,它可以检测到当机器人靠近行端时,感知点云的统计分布的急剧变化。还实现了一种行输入方法,它构建了一个由响应路径跟踪器使用的本地映射。该系统在一个葡萄园的一个24排进行了评估。一旦机器人距离一行的末端超过7米,算法就会以100%的成功率检测到它,并计算出距离它的距离,平均误差为0.54 m。该系统也被评估在葡萄园配置与平行和倾斜的葡萄树行在连续的块。该系统在所有配置中都运行良好,除了下一个块的行与当前块的行对齐,并且海角宽度更接近于5米。