lgsvl 现状
lgsvl自从2023年1月停服务以来,几乎就没有lgsvl最新的消息了,其实还是可以通过官网去查看技术文档,(https://www.svlsimulator.com/)但是没法像之前那样注册,登录,配置agent了,这个就很麻烦,去用Carla又有一些传感器没有,比如理想传感器3D ground truth, lane line sensor等等,不得不说lgsvl还是一款非常不错的仿真器,只不过现在没法配置了。我这边可以通过一定的办法做一些微调,希望可以给大家一些改进的思路;
我的os是18.04
由于之前一直在使用lgsvl,所以配置出来的场景还算丰富,sensor中有can bus、GPS、GPS Odometry、Lidar、Signal Sensor、Main Camera、Telephone Camera、Keyboard Car control、Wheel Car Control、Apollo Car Control、Stop Line sensor、Vehicle Odometry Seneor、Video Recording Sensor、3D Ground Truth Sensor、Depth Camera Sensor、IMU sensor、Lidar Sensor、2DGround Truth Sensor;我会全部分享出来,供给大家使用。

我的这个办法可以对现有的一些传感器做位置上的变动,topic的设置,名称的更改,agent有限,所以基本满足需求吧!
下面开始讲解:
Ubuntu的用户们,在下载好lgsvl后,可以去/home/user/目录下寻找一个.config的隐藏文件,如果找不到就点击文件管理器右上角三条杠的倒数第二个,显示隐藏文件、进去config文件后找到unity3d,进去找LGElectronics文件夹,找到SVLSimulator-2021.3,可以看到有一个文件叫做data.db
(****先做备份、因为你有很大的几率会改错这个文件****)
一般情况下是打不开这个文件的,需要下载一个工具:DB Browser for SQLite
官网地址:http://www.sqlitebrowser.org/
下载链接:http://www.sqlitebrowser.org/dl/
下载好之后,就可以打开这个data.db文件了;
打开之后就是这个鬼样子!
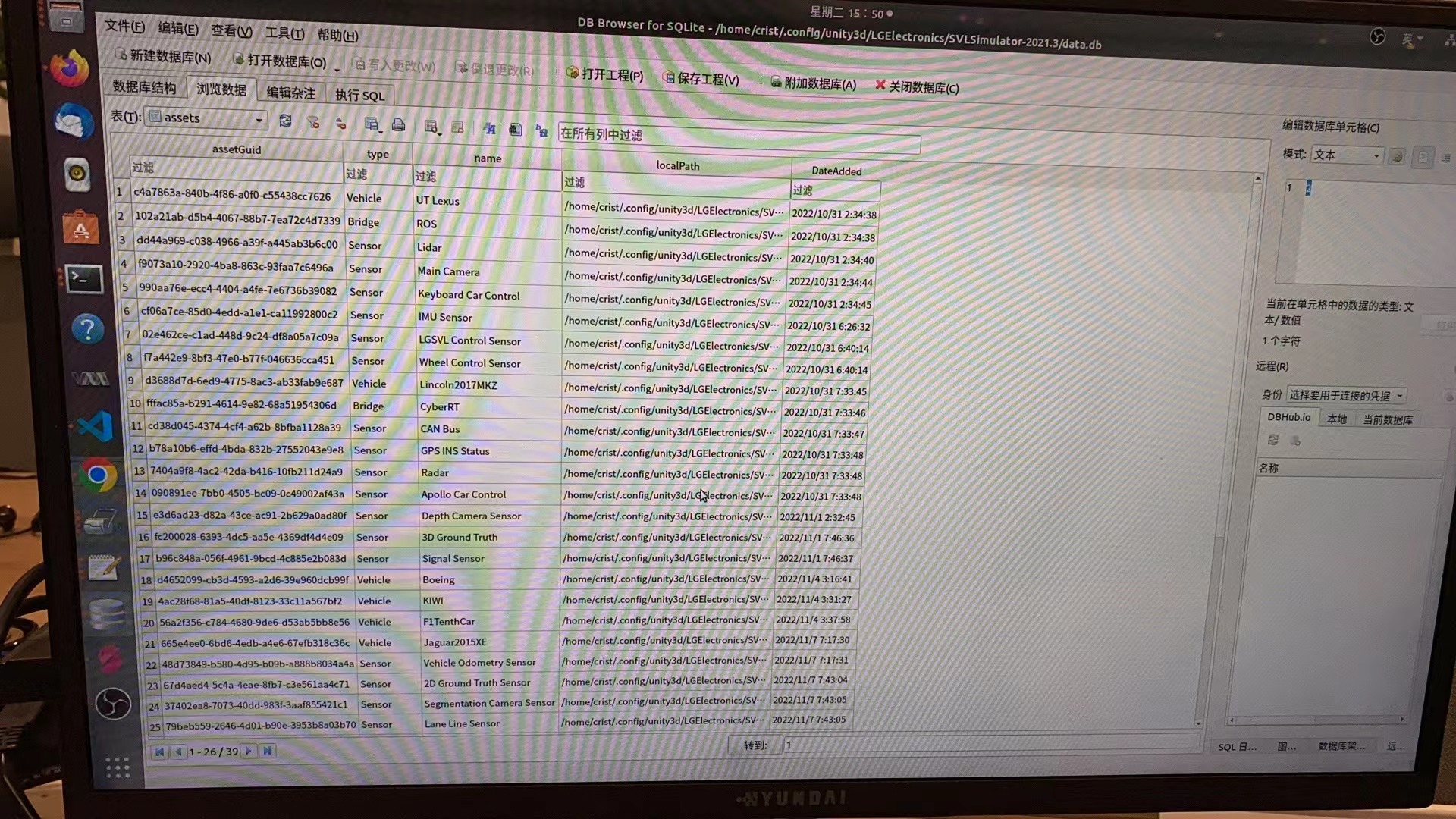
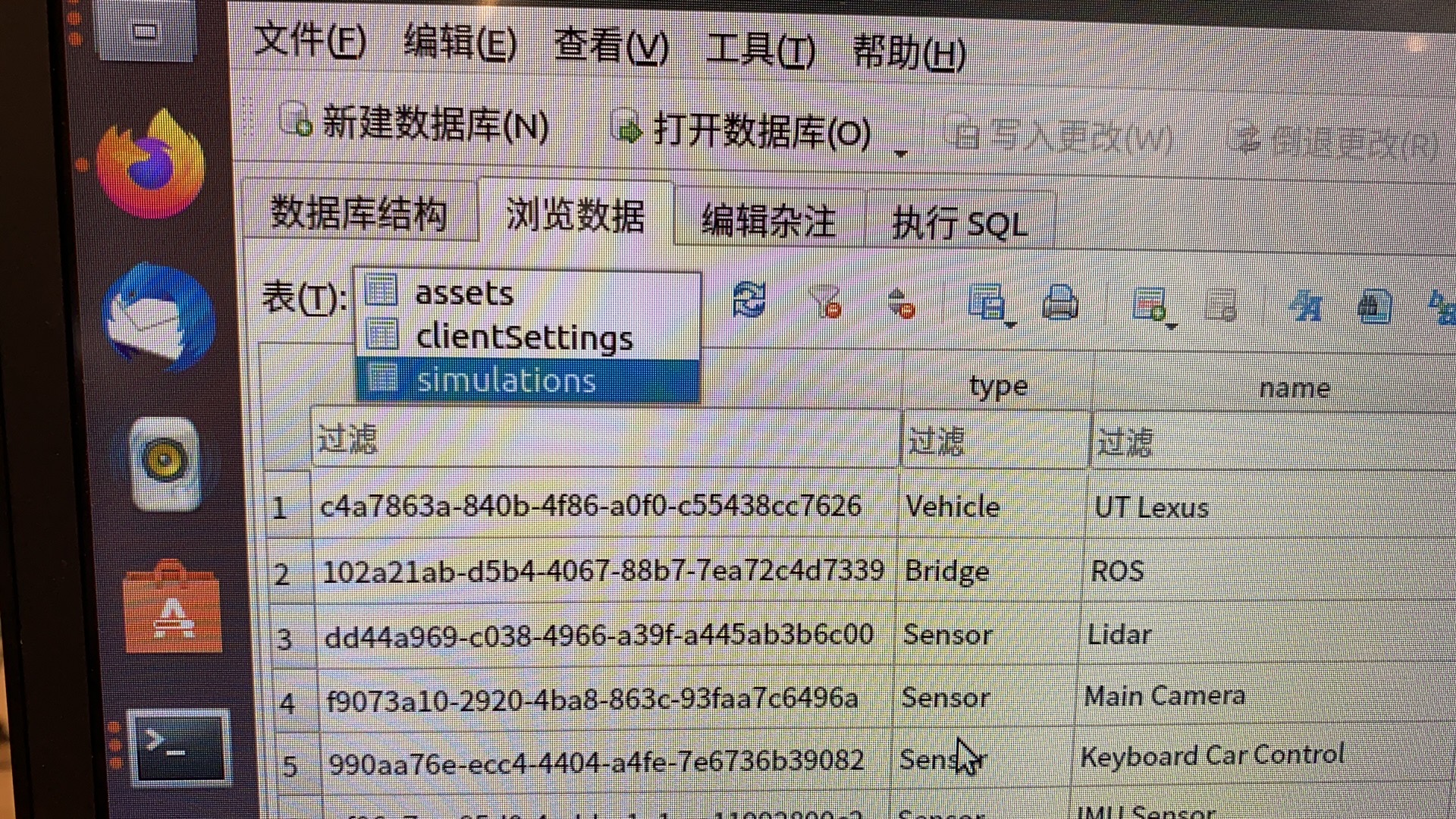
点击浏览数据simulators
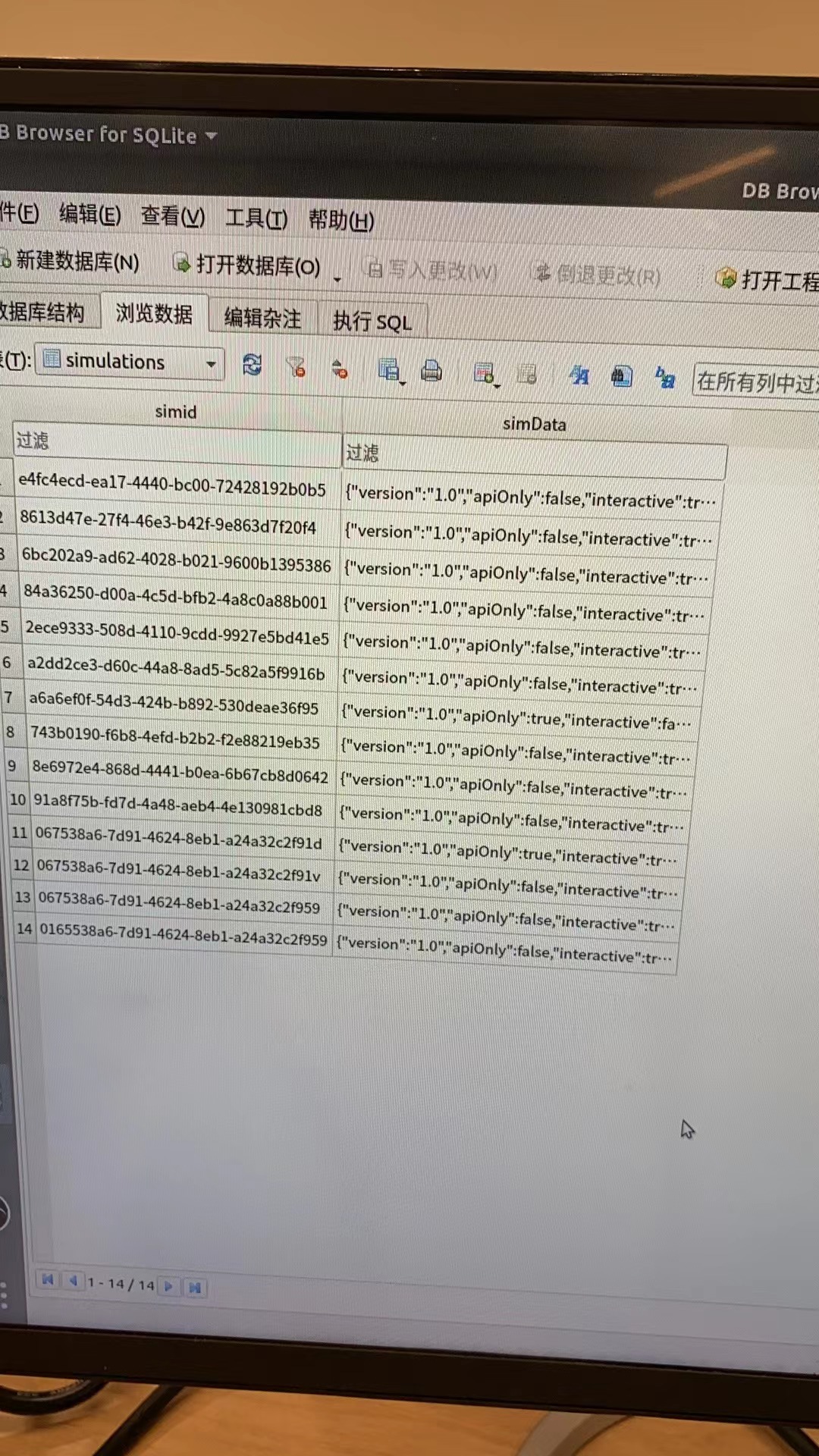
可以看到这14个就是我的仿真器里面配置的14个场景,前面的是id,后面一列是lgsvl配置的json文件,这些数据都别乱动,鼠标放到最后,点击
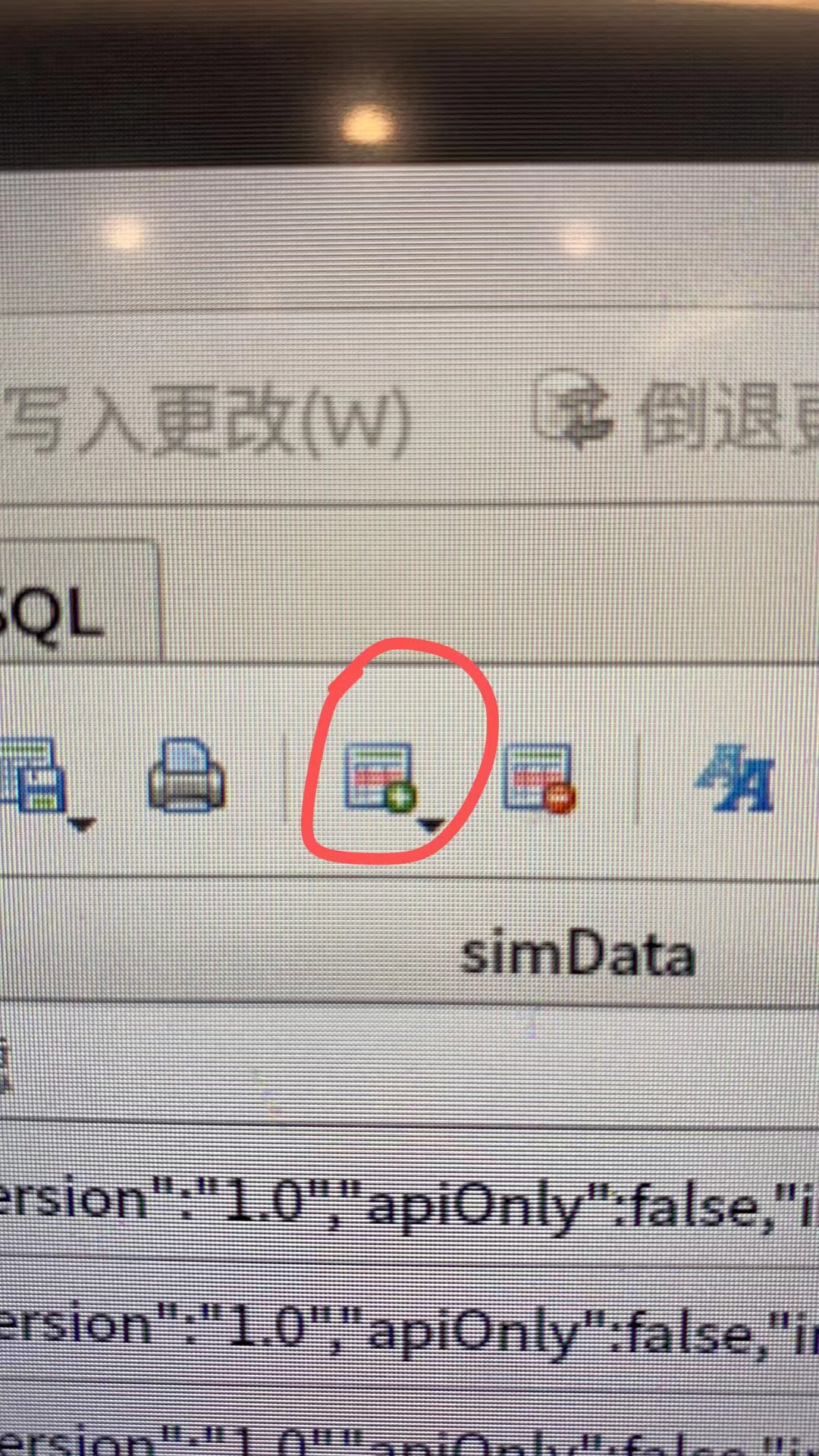
这个小图标,下面再加入一列,设置一个和之前不重复的 id数字,右边的simData,可以复制一个你想基于哪个场景更改的数据复制到vscode里面;
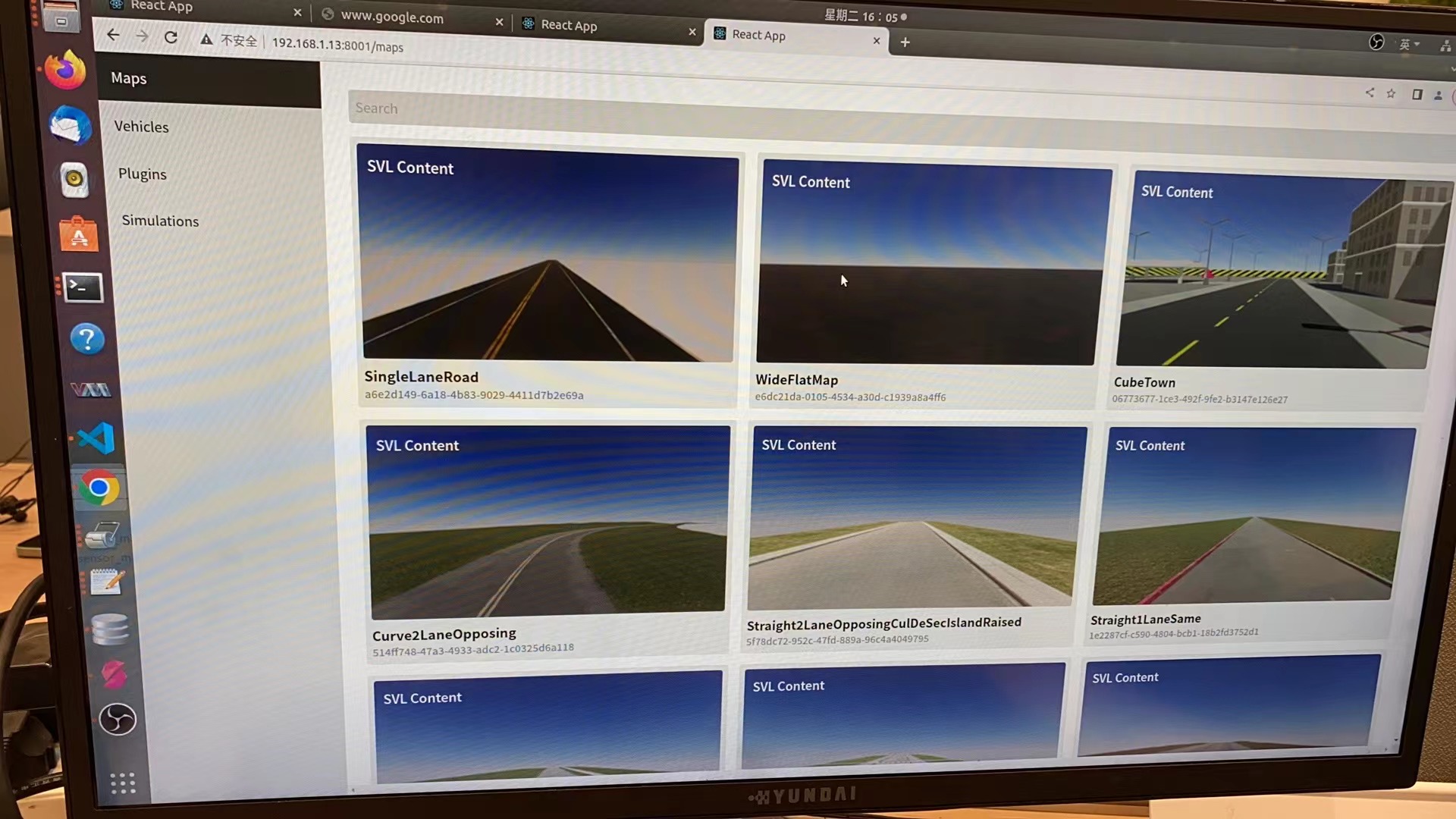
在vscode中,需要先新建一个.json的文件,将刚才复制好的json复制到里面,点击右键格式化文档(ctrl+Shift+l)就会将压缩好的json展平,做完修改后可以将文本全部复制,JSON在线 | JSON解析格式化—LZL在线工具 (lzltool.cn)到这里压缩,压缩完毕后塞回到data.db文件中,记得关掉数据库工具,否则lgsvl会很卡,重新打开lgsvl后发现多出来一个场景;
结合自己的实践讲讲经验:
可以将别的场景中有的传感器复制到我想要的场景中,可以改传感器的位置,topic,frequency;
vehicle改动的话不会成功,所谓的改动也是讲本地的传感器,map,vehicle的id替换掉;
虽然GitHub上有人搭建了离线版的服务器:我也按照它的介绍搭建起来了,但是
(1)无法从云端下载agent到本地
(2)只能使用PythonAPI接口,场景编辑器点击之后离线版服务器就会崩掉,需要重新run一下docker;
总之就是没啥用,希望后续有改进的部分;
我的lgsvl的资料会分享给大家,希望大家可以尽快的让lgsvl重新运转起来!!!
(2条消息) lgsvl资源data.db资源-CSDN文库